Verfügbare Themen für Bachelorarbeiten
Liste der verfügbaren Themen Bachelorarbeiten
- Spracherkennung und natürliches Sprachverständnis für die Manipulation von Roboterarmen (reserviert)
- Erkennung und Klassifizierung von Objekten anhand der Masse mithilfe von Feldskalen
- Kalibrierung von Ultraschallsonden mit einem Roboterarm in medizinischen Anwendungen
- Entwicklung und Evaluierung von PI-, PD- und PID-Reglern zur Steuerung eines redundanten Roboterarms (reserviert)
- Konvertierung und Verarbeitung von Ultraschallbildern in der Medizinrobotik (reserviert)
- Implementierung des Algorithmus zur Analyse der Substratstruktur mittels Tiefenkamera in der mobilen Robotik
- Mathematische Modellierung, Identifizierung von Parametern und Steuerung eines mobilen Roboters mit Differentialantrieb (Mentor außerordentlicher Professor Vladimir Milić)
- Anwendung von RFID im Transportsystem
- Einsatz von Softgreifern zur Objektmanipulation
- Integration des Robotic Operating System (ROS) in den mobilen Roboter Waypoint Robotics VECTOR
- Anwendung von RFID im Transportsystem
- Robotersysteme zum Testen von Pipelines (vollendet, mögliche Fortsetzung)
Unbedingt lesen: Kurzanleitung und Regeln
Alle Studierenden, die sich für die bisher im CRTA erstellten Bachelorarbeiten interessieren, können sich die Arbeiten ansehen Hier. Alle im alten Labor durchgeführten Bachelorarbeiten wurden vor 2021 verteidigt. Alle Arbeiten aus den Jahren 2021 und 2022 wurden in CRTA durchgeführt und umgesetzt. Von den Studierenden, die das Thema der Abschlussarbeit wählen, wird aktives Engagement und verantwortungsvolle Arbeit am vorgegebenen Thema erwartet. Allen Studierenden, die sich für eine Bachelorarbeit zu einem der unten angebotenen Themen entscheiden, wird die gesamte notwendige Ausstattung zur Verfügung gestellt, außerdem werden Arbeitsplätze und ein (gemeinsamer) Computer im Labor und/oder in den Praktika zur Verfügung gestellt. Wenn die Bachelorarbeit einen experimentellen Teil beinhaltet, können Studierende im zugehörigen Labor arbeiten, in dem Experimente durchgeführt werden: Labor für Autonome Systeme, Labor für medizinische Robotik oder Labor für Computerintelligenz. Neben der Arbeit in den Laboren stehen allen Studierenden zwei Praktika zur Verfügung, deren Ablaufplan einsehbar ist Hier. Bei der Arbeit in Laboren und Praktika sind von den Studierenden alle Verhaltensregeln sowie die Regeln für den Umgang mit Computern, Labor- und sonstigen Geräten einzuhalten. Nach der Arbeit sind die Arbeitsplätze im CRTA stets sauber und aufgeräumt zu hinterlassen.
Neben Laboren und Laborgeräten stehen den Studierenden im studentischen Teil des CRTA auch 3D-Drucker, verschiedene studentische Werkzeuge und Geräte zur Verfügung, die für eine Vielzahl von Themen, die praktische experimentelle Arbeiten beinhalten, notwendig sind.
Der Forscher Luka Rabuzin ist für die Arbeit mit Studenten- und anderen Tools verantwortlich und Luka führt Sie in alle Regeln ein, wenn Sie mit der Arbeit an Ihrem Thema beginnen.
Bezüglich einiger allgemeiner Fragen und Erfahrungen von Studierenden können Sie sich jederzeit an unsere aktuellen Studierenden, Absolventen oder Demos wenden.
Verfassen und Einreichen der ABachelorarbeit
Die Bachelorarbeit muss gemäß den verfügbaren offiziellen Anweisungen und der Vorlage für die Abschlussarbeit verfasst werden Hier. Bevor Sie die Abschlussarbeit schreiben, ist es notwendig, alle Materialien im Detail zu studieren und sich bei Fragen an den Mentor oder Kommentator zu wenden.
Bevor mit dem Schreiben der Abschlussarbeit begonnen wird, empfiehlt es sich, den Aufbau der Arbeit mit dem Mentor oder Kommentator abzustimmen. Im Hinblick auf den gewählten Abgabetermin für die Abschlussarbeit muss die vollständig ausgearbeitete Abschlussarbeit mindestens 7 Tage vor dem offiziellen Abgabetermin dem Mentor bzw. Kommentator zur Lektüre (Word- und PDF-Version) per E-Mail vorgelegt werden. Die zur Lektüre eingereichte Abschlussarbeit muss vollständig und korrekt geschrieben sein (muss überprüft werden). Korrigiere mich).
Wenn Sie sich für einen Bereich oder ein Thema interessieren, das nicht empfohlen wird, zögern Sie nicht Sie können eigene Themen, Ideen und Projekte vorschlagen an einen der CRTA-Mitarbeiter, und dann können Sie sich mit einem potenziellen Mentor und/oder Kommentator und Mitarbeitern des Themas auf den Vorschlag Ihres Themas einigen. Bei weiteren Fragen wenden Sie sich bitte per E-Mail an die für ein bestimmtes Thema zuständige Lehrkraft oder kommen Sie während der Beratung vorbei.
Detaillierte Beschreibung der verfügbaren Themen
Spracherkennung und natürliches Sprachverständnis für die Manipulation von Roboterarmen
Ziel der Arbeit ist die Entwicklung einer Schnittstelle, mit der der Roboterarm UR5 von Universal Robots per Sprache gesteuert werden kann, gedacht für Benutzer ohne Programmiererfahrung. Die Arbeit integriert Speech-to-Text, Natural Language Understanding (NLU) und Befehlsübersetzung in die Ausführung für die Manipulation von Robotern durch verbale Befehle.
Das System empfängt Sprachbefehle und wandelt sie in Text um (Speech-to-Text), dann interpretiert das NLU-Modul die Befehle und übersetzt sie in Steuerungen für den UR5, wodurch Bewegungen wie seitliche, vertikale Bewegungen und Rotationen sowie Gelenkrotationen ermöglicht werden. Die Auswertung zeigt, dass Sprachbefehle eine einfache Steuerung des Roboterarms ermöglichen, was das Potenzial zur Verbesserung der Mensch-Roboter-Interaktion verdeutlicht.
Schlüsselwörter: Spracherkennung, Verständnis natürlicher Sprache, Roboterhandsteuerung, Sprache-zu-Text, Befehlsübersetzung.

Erkennung und Klassifizierung von Objekten anhand der Masse mithilfe von Feldskalen
Die Aufgabe besteht darin, die Gesamtlösung zu integrieren:
- Studieren Sie Literatur zu Objekterkennung und -klassifizierung, Massenmessung und Feldskalentechnologie
- Entwickeln Sie eine Methodik zur Objekterkennung und -klassifizierung basierend auf der Masse
- Implementieren Sie ein System, das das Skalenfeld zur Klassifizierung von Objekten nutzt – richten Sie das Betriebssystem ein und erstellen Sie die Programmierumgebung
- Testen und bewerten Sie das System an einer Reihe von Objekten unterschiedlicher Masse

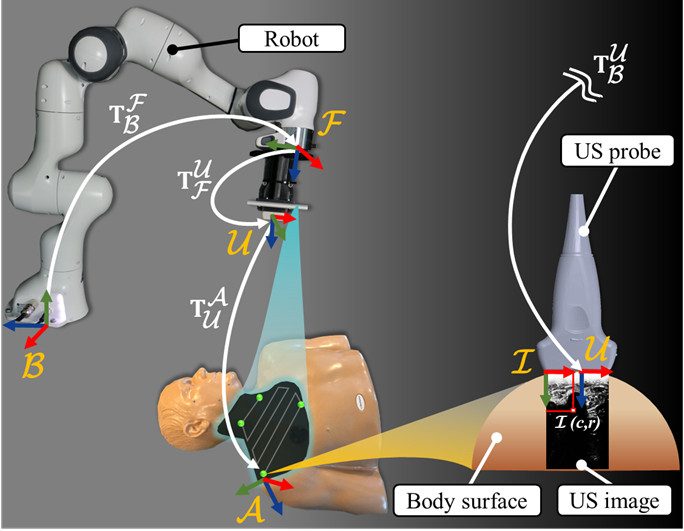
Kalibrierung von Ultraschallsonden mit einem Roboterarm in medizinischen Anwendungen
Ziel dieser Abschlussarbeit ist die Entwicklung und Implementierung von Kalibrierungsmethoden, die eine präzise Integration von Ultraschallsonden in einen Roboterarm unter Verwendung von mit Ultraschall gewonnenen 2D-Bildern ermöglichen. Die Arbeit konzentriert sich auf zwei Arten von Ultraschallsonden: biplanare und lineare, mit dem Ziel, die Transformation zwischen dem Koordinatensystem des Roboterflansches und dem Koordinatensystem der Ultraschallsonde zu bestimmen und zu berechnen. Für die Zwecke dieser Arbeit werden medizinischer Ultraschall, ein Industrieroboterarm und ein Computer zur Datenverarbeitung verwendet.
Entwicklung und Evaluierung von PI-, PD- und PID-Reglern zur Steuerung eines redundanten Roboterarms
Im Rahmen dieser Arbeit ist es notwendig, die Möglichkeiten und Leistungen von Frank im Detail zu studieren Kontrolle Interface (FCI), eine Schnittstelle, die eine schnelle und direkte Low-Level-Zwei-Wege-Kommunikation mit einem Roboterarm und einer Roboterhand ermöglicht. FCI bietet Echtzeitsteuerung mit einer Frequenz von 1 kHzDies macht es ideal für die Erkundung und Umsetzung neuer Planungs- und Managementpläne auf niedriger Ebene. Die Aufgabe besteht darin, den Roboter in der Sprache C++ zu programmieren, um die Bewegung des Roboterarms mithilfe verschiedener Steuermodi (PI, PD, PID) entsprechend dem vorgegebenen Bewegungsprofil der Werkzeugspitze zu steuern. Die konkreten Ziele der Arbeit sind:
Entwickeln Sie C++-Programme, die PI-, PD- und PID-Steuerungsmodi implementieren, um die Werkzeugspitze eines Roboterarms entsprechend einem vorgegebenen Bewegungsprofil zu bewegen.
Experimentelle Tests durchführen, um die Systemantworten, die durch die Anwendung verschiedener Steuerungsmethoden erhalten wurden, mit den theoretisch entworfenen Antworten zu vergleichen.
Die Leistung von PI-, PD- und PID-Regelungen im Kontext der Genauigkeit der Folgeantwort, der Einschwingzeit und des Überschwingens vergleichen.
Die Vor- und Nachteile jedes Steuerungsansatzes im Kontext spezifischer Anwendungen von Roboterarmen analysieren und diskutieren.
Im praktischen Teil der Arbeit müssen für die entwickelten Anwendungen alle notwendigen Roboterwerkzeuge und anderen Konstruktionselemente entworfen und hergestellt werden, die in den Experimenten verwendet werden. Die Arbeit wird an der Ausrüstung im CRTA validiert, wo die Bewegung des Roboterarms basierend auf den entwickelten Programmen demonstriert wird.

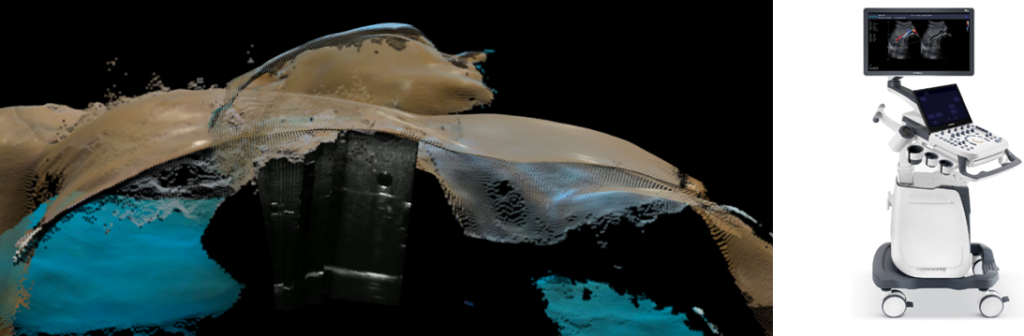
Konvertierung und Verarbeitung von Ultraschallbildern in der medizinischen Robotik
Eine Methodik entwickeln, um Bilder vom Bildschirm des Ultraschallgeräts aufzunehmen, unter Verwendung ausgewählter vordefinierter Einstellungen. Dieser Prozess sollte Software-Tools umfassen, die in der Lage sind, Bilder auf dem Bildschirm effizient zu erfassen (zu detektieren) und sie automatisch in das OpenCV-Mat-Format zur weiteren Verarbeitung und Analyse zu konvertieren. Die Konvertierung sollte die Bildqualität bewahren, um eine präzise Visualisierung der Ultraschalldaten zu ermöglichen. Die Softwarelösungen sollten für eine schnelle Verarbeitung optimiert sein, mit minimalem Informationsverlust während der Konvertierung.
Das Projekt erfordert Kenntnisse in C++-Programmierung, der OpenCV-Bibliothek und ein Verständnis der Mechanik von Roboterarmen und Ultraschallsonden. Es zielt auf die Integration und Automatisierung des Aufnahmeprozesses zur Verbesserung medizinischer Verfahren ab.
Robotersysteme zur Prüfung von Rohrleitungen
Die Lebensmittel-, Prozess- und viele andere Industriezweige verwenden verschiedene Arten von Rohrleitungen zum Transport form- und gestaltloser Stoffe wie Gase, Flüssigkeiten, Pulver usw. Aufgrund der Art des durch die Rohrleitungen transportierten Rohmaterials kommt es zur Kontamination der Innenwand der Rohrleitungen, weshalb diese gemäß einem definierten Reinigungs- und Wartungsplan gereinigt werden müssen. Der Reinigungsprozess kann manuell, mechanisiert oder automatisiert/robotisiert sein. Der Reinigungsprozess ist zeitaufwendig und kostspielig und erfordert in der Regel den Einsatz von Menschen. Aus diesem Grund werden aktiv Robotersysteme entwickelt, die die Fähigkeit haben, sich durch schwer zugängliche Rohrleitungen zu bewegen und nützliche Aufgaben auszuführen.
Im Rahmen dieser Arbeit ist es notwendig, die verfügbare wissenschaftliche und fachliche Literatur durch die Durchsuchung von Datenbanken wie Scopus, IEEE, Google Scholar und verfügbaren Patentdatenbanken zu studieren. Es ist erforderlich, eine Analyse bestehender Robotersysteme für die Bewegung durch Rohrleitungen mit einem Innendurchmesser im Bereich von 70 bis 150 mm durchzuführen. Für eine vorgegebene Nachbildung einer Rohrleitung mit einer Länge von 40 m und einem Innendurchmesser von 90 mm ist es notwendig, eine konzeptionelle Lösung für einen mobilen Roboter unter Verwendung bestehender und/oder eigener technischer Lösungen vorzuschlagen.
Bei der konzeptionellen Ausarbeitung des Roboters ist es notwendig, so viele standardisierte mechanische, elektromechanische, Antriebs-, Energie-, Sensor- und Steuerungskomponenten wie möglich zu verwenden.
Alle ausreichend detaillierten Komponenten des Konzepts des mobilen Roboters können mit der 3D-Drucktechnologie im CRTA hergestellt werden.
Für weitere Details zu diesem Thema wenden Sie sich bitte an Doz. Ph.D. Marko Švaco.
Mathematische Modellierung, Parameteridentifikation und Steuerung eines mobilen Roboters mit Differentialantrieb
Bei den meisten mobilen Robotern mit Differentialstruktur basieren die Steuerungsgesetze hauptsächlich nur auf dem kinematischen Modell des Roboters. Bei hohen Geschwindigkeiten und dem Transport schwerer Lasten ist es jedoch wichtig, die Dynamik des Roboters und der Antriebsmotoren zu berücksichtigen. Daher ist es in solchen Fällen wichtig, ein vollständiges mathematisches Modell zu erstellen und eine Parameteridentifikation durchzuführen, da dies eine notwendige Voraussetzung für die Synthese und praktische Implementierung der Steuerungsgesetze dieser Systemklasse ist.
In der Arbeit ist es notwendig:
- Ein vollständiges mathematisches Modell eines mobilen Roboters mit Differentialstruktur unter Einbeziehung der Dynamik und Kinematik des Roboters sowie der Dynamik der Aktuatoren erstellen.
- Das zuvor erstellte mathematische Modell in Form eines linearen Regressionsmodells in Bezug auf die Parameter des mobilen Roboters darstellen. Anschließend experimentelle Messungen an einem mobilen Roboter mit Differentialkinematik im Labor für autonome Systeme (CRTA) unter Verwendung des externen Messsystems OptiTrack zur Parameteridentifikation des Roboters durchführen.
- Simulationsmodelle in einem geeigneten mathematischen Software-Tool erstellen, in denen die Differentialgleichungen direkt numerisch unter Verwendung eingebauter Funktionen gelöst werden.
- Auf der Grundlage der Simulationen die Synthese eines PID-Reglers durchführen, der die gewünschte Radgeschwindigkeit des Roboters sicherstellt. Simulationen für verschiedene Eingangs-/Referenzgeschwindigkeiten durchführen und die Reaktionen kommentieren.
- Die Möglichkeiten der Implementierung des zuvor entworfenen PID-Reglers auf einem mobilen Roboter mit Differentialkinematik im Labor für autonome Systeme (CRTA) in Betracht ziehen.
Für weitere Details zu diesem Thema wenden Sie sich bitte an Assoc. Prof. Vladimir Milić und Assistent Branimir Ćaran.
Anwendung von RFID im Transportsystem
Artikelträger auf Förderanlagen kommen in den unterschiedlichsten Produktionsprozessen zum Einsatz. Halterungen halten Gegenstände während Transport, Produktion und Inspektion in Position. Sie sind in der Regel bestimmten Fächern zugeordnet. Daher ist es möglich, Spediteure zur Identifizierung und Verfolgung von Prozessschritten zu nutzen. Die Werkstücke müssen mittels des Trägers automatisch und fehlerfrei identifiziert werden. Zur dezentralen Steuerung des Prozessablaufs muss diese Identifizierung an unterschiedlichen Stellen der Anlage möglich sein. Die einzelnen Produktionsschritte müssen aufeinander abgestimmt sein. Ziel ist es zugleich, Voraussetzungen für eine lückenlose Nachvollziehbarkeit einzelner Schritte zu schaffen. Die Lösung besteht darin, den RFID-Tag an einer geeigneten Stelle anzubringen, beispielsweise auf der Unterseite des Trägers. An den jeweiligen Bearbeitungsstationen sind RFID-Schreib-/Leseköpfe montiert. Das RFID-System sorgt für eine sichere Identifizierung des Trägers. Da der RFID-Tag beschreibbar ist, kann sein Datensatz an jeder Station mit Informationen über die durchgeführten Prozessschritte ergänzt werden. Diese Informationen können zur Steuerung von Schaltern oder zur Anstoßung spezifischer Produktionsprozesse genutzt werden. Tags können auch Qualitätsdaten speichern. Im Rahmen der Arbeiten ist es erforderlich, das RFID-System SIMATIC RF300 PROFINET auf dem Transportsystem im Labor anzuwenden.
Für weitere Informationen zu diesem Thema wenden Sie sich bitte an Ph.D. Bojan Šekoranja.
Einsatz von Softgreifern zur Objektmanipulation
Softgreifer werden in der Robotik beim Umgang mit empfindlichen Objekten eingesetzt. Der Vorteil von Softgreifern besteht darin, dass sie sich durch ihre Form oder andere Eigenschaften an unterschiedliche Objekte anpassen lassen. Um in dieser Arbeit die Möglichkeiten verschiedener Softgreifer zu testen, ist Folgendes erforderlich:
- detaillierte Überprüfung und Analyse von Soft-Greifern, die in der Industrie eingesetzt werden,
- Am bestehenden Roboter im Labor für autonome Systeme ist es notwendig, den Betrieb von mindestens drei verfügbaren Softgreifern (mGrip) zu validierenTM , piSOFTGRIP® und FlexShapeGripper),
- einen Versuchsaufbau und ein Szenario für die Handhabung von mindestens fünf verschiedenen Objekten durch den ausgewählten Roboter unter Verwendung von drei verschiedenen Softgreifern vorschlagen, entwerfen und erstellen,
- Codieren Sie Roboterwerkzeuge und ermöglichen Sie den automatischen Wechsel von Soft-Greifern mithilfe eines im Labor verfügbaren Standard-Werkzeugwechslers.
Für die entwickelte Anwendung des Roboters ist es notwendig, alle notwendigen Roboterwerkzeuge, Flansche, Stützen und andere Strukturelemente zu entwerfen und herzustellen (3D-Druck, modulare Aluminiumprofile usw.). Die Arbeiten müssen an den Geräten im Labor für Autonome Systeme validiert werden.
Für weitere Details zu diesem Thema wenden Sie sich bitte an Doz. Ph.D. Marko Švaco.
Anwendung des Roboterbetriebssystems (ROS2) auf einem mobilen Roboter in der virtuellen Umgebung von Gazebo
Das Robotic Operating System (ROS) ist eine Umgebung, die in der akademischen Gemeinschaft der Robotik äußerst beliebt ist. In den letzten Jahren hat die Präsenz der ROS-Umgebung in der Industrie zugenommen und daher ist die Notwendigkeit entstanden, sie zu verbessern. Da ROS als Umgebung für Wissenschaftler entwickelt wurde und daher nicht robust genug war, begann die Community mit der Entwicklung von ROS2. ROS2 ist die zweite Version von ROS, die mit dem Ziel einer besseren und robusteren Implementierung in der Mobil- und Industrieroboterbranche entwickelt wurde. Der Schwerpunkt in der ROS2-Umgebung liegt auf Echtzeitleistung, Robustheit und Systemsicherheit.
Im Rahmen dieser Arbeit ist es notwendig:
- ROS2, seine Möglichkeiten und Anwendung im Detail zu untersuchen und mit ROS zu vergleichen,
- für ROS entwickelte Algorithmen in der ROS2-Umgebung erforschen und implementieren,
- Erstellen Sie im Gazebo-Simulator so detailliert wie möglich die virtuelle Umgebung des Computer Intelligence Laboratory in CRTA.
- Fügen Sie mithilfe der ROS2-Umgebung einen mobilen Roboter zum Gazebo-Simulator hinzu und trainieren Sie die Fähigkeit, ihn zu verwalten.
- Implementieren Sie vorhandene Algorithmen zur Kartierung und Lokalisierung eines mobilen Roboters.
Für weitere Einzelheiten zu diesem Thema wenden Sie sich bitte an Assoc. Ph.D. Marko Švaco und Doktorand Branimir Ćaran.
Integration des Robotic Operating System (ROS) in den mobilen Roboter Waypoint Robotics VECTOR
Waypoint Robotics VECTOR ist ein mobiler Roboter mit vier schwedischen Rädern im 45-Grad-Winkel (Mecanum). Der Roboter wird über einen Webdienst verwaltet, bei dem er mit der IP-Adresse des Roboters verbunden wird und ihm Aufgaben wie Kartierung, Lokalisierung, Navigation und Lösung von Missionen zugewiesen werden. Aufgrund der Unpraktikabilität einer solchen Anwendung und dem Wunsch, in naher Zukunft einen Roboterarm in einen Roboter zu integrieren, besteht die Aufgabe dieser Abschlussarbeit darin:
- mit dem Roboter kommunizieren Rosbridge Knoten in ROS,
- Aktivieren Sie das Senden von Geschwindigkeitsbefehlen und das Lesen des Sensorstatus in ROS.
- Implementierung von Algorithmen zur Kartierung und Lokalisierung,
- einen Algorithmus zum Navigieren des Roboters im kartierten Raum implementieren,
- Bereiten Sie das System für die Integration des Roboterarms vor.
Für weitere Einzelheiten zu diesem Thema wenden Sie sich bitte an Assoc. Ph.D. Marko Švaco und Doktorand Branimir Ćaran.
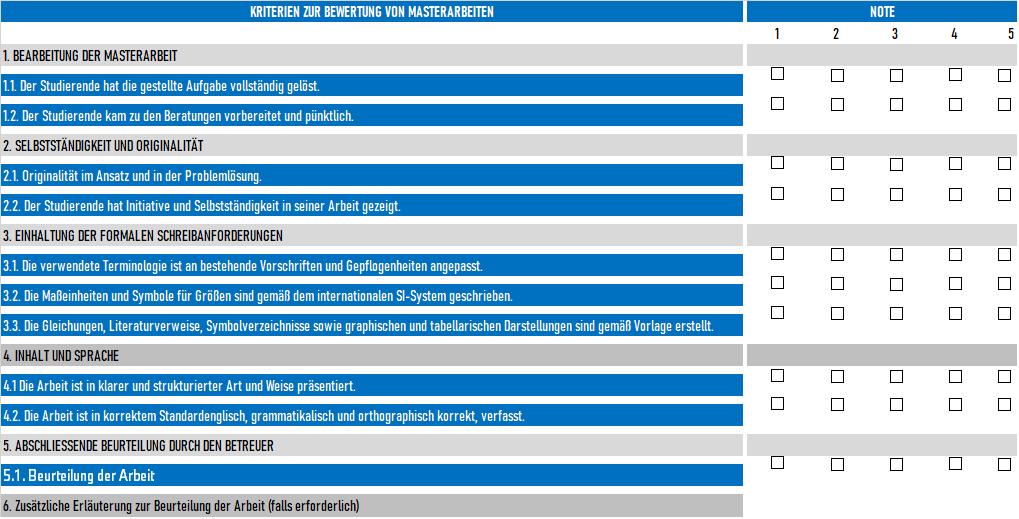
Abschlussarbeiten müssen nach den offiziellen Anweisungen des FSB verfasst werden. Entsprechend der Einhaltung formeller Regeln und Weisungen und vor allem der Arbeit an der Abschlussarbeit, Unabhängigkeit und Originalität, bildet sich die Bewertung des Mentors und Kommentators. Zusätzlich zur Einzelbewertung der Abschlussarbeit wird im Rahmen der Präsentation vor der Kommission eine Note für die Präsentation der Abschlussarbeit vergeben.
Wir laden alle Studierenden ein, sie alle zu lesen Regeln und Anweisungen im Zusammenhang mit der Erstellung endgültiger Arbeiten. Für Anweisungen zur Erstellung einer Präsentation der Abschlussarbeit wenden Sie sich bitte direkt an Ihren Mentor.
Die Erstellung der Website wurde von der Europäischen Union aus dem Europäischen Fonds für regionale Entwicklung kofinanziert.
Für den Inhalt der Website ist ausschließlich die Fakultät für Maschinenbau und Schiffbau verantwortlich.