Available BSc topics
List of available topics Undergraduate theses
- Prepoznavanje govora i razumijevanja prirodnog jezika za manipulaciju robotskom rukom (rezervirano)
- Detekcija i klasifikacija objekata na temelju mase pomoću polja vaga
- Kalibracija ultrazvučnih sondi s robotskom rukom u medicinskim primjenama
- Razvoj i evaluacija PI, PD i PID kontrolera za upravljanje redundantnom robotskom rukom (rezervirano)
- Konverzija i obrada ultrazvučnih slika u medicinskoj robotici (rezerviran)
- Implementacija algoritma za analizu strukture podloge korištenjem dubinske kamere u mobilnoj robotici
- Matematičko modeliranje, identifikacija parametara i upravljanje mobilnim robotom s diferencijalnim pogonom (mentor izv. prof. Vladimir Milić)
- Application of RFID in Transportation Systems
- Application of Soft Grippers for Object Manipulation
- Integration of the Robot Operating System (ROS) on the Waypoint Robotics VECTOR Mobile Robot
- Primjena RFID-a na transportnom sustav-u
- Robotski sustavi za ispitivanje cjevovoda (završeno, moguć nastavak)
Must read: brief instructions and rules
For all students interested in the BSc theses done so far in CRTA, you can view the theses here. All BSc theses done within the old laboratory were defended before 2021. All theses from 2021 and 2022 were created and implemented within CRTA. Students who choose a thesis topic expect active engagement and responsible work on the assigned topic. All students who choose a thesis in one of the provided topics will be equipped with all necessary equipment, workstations, and (shared) computers in the laboratory and/or practicums. If the thesis involves an experimental part, students will be enabled to access to the appropriate laboratory where the experiments will be carried out: Laboratory for Autonomous Systems, Laboratory for Medical Robotics, or Laboratory for Artificial Intelligence. In addition to working in laboratories, students also have access to two practicums whose occupation schedules can be seen here. While working in the laboratories and practicums, students must adhere to all rules of behavior as well as rules for the use of the computer, laboratory, and other equipment. After work, it is necessary to leave the workstations in CRTA clean and tidy.
In addition to laboratories and laboratory equipment, in the student section of CRTA, students have their 3D printers, various student tools, and equipment that are necessary for a large number of topics that include practical experimental work.
Researcher Luka Rabuzin is responsible for working with students and other tools, and he will provide you with all the necessary guidelines when you start working on your topic.
For any general questions and experiences, you can always reach out to our current students, graduates, or demonstrators.
Writing and submission of the BSc thesis
The undergraduate thesis should be written in accordance with the official guidelines and template for the undegraduate thesis, which can be found here. Before writing the thesis, it is necessary to thoroughly study all the materials and contact mentor or comentor for any questions.
Before starting to write the thesis, it is suggested to discuss the structure of the thesis with the mentor or comentor. Considering the chosen submission deadline for the undergraduate thesis, the complete written thesis should be submitted to the mentor or comentor for review (Word and PDF formats) via email at least 7 days before the official submission deadline. The thesis sent for review must be complete free of spelling or grammar errors (make sure to perform a spell check using ispravi.me).
If you are interested in an area or topic that is not suggested, feel free to suggest your own topics, ideas and projects to one of the CRTA employees, and then you can discuss your topic proposal with a potential mentor and/or comentor and collaborators on the topic. For any other questions, feel free to email the teacher responsible for a specific topic or visit them during consultation hours.
Detailed description of available topics
Prepoznavanje govora i razumijevanja prirodnog jezika za manipulaciju robotskom rukom
Cilj rada je razviti sučelje kojim se robotska ruka Universal Robots UR5 može upravljati glasom, namijenjeno korisnicima bez programerskog iskustva. Rad integrira Prepoznavanje Govora (Speech-to-Text), Razumijevanje Prirodnog Jezika (Natural Language Understanding – NLU) i Prijevod Naredbi u Izvršenje za manipulaciju robotom putem verbalnih naredbi.
Sustav prima glasovne naredbe i pretvara ih u tekst (Speech-to-Text), zatim NLU modul tumači naredbe i prevodi ih u kontrole za UR5, omogućujući pokrete kao što su bočno, vertikalno kretanje i rotacije, te rotacije zglobova. Evaluacija pokazuje da glasovne naredbe omogućuju jednostavno upravljanje robotskom rukom, ističući potencijal za poboljšanje interakcije čovjek-robot.
Ključne riječi: Prepoznavanje Govora, Razumijevanje Prirodnog Jezika, Kontrola Robotske Ruke, Govor-u-Tekst, Prijevod Naredbi.
Detekcija i klasifikacija objekata na temelju mase pomoću polja vaga
Zadatak je integrirati kompletno rješenje:
- Proučiti literaturu vezanu za detekciju i klasifikaciju objekata, mjerenje mase, i tehnologiju polja vaga
- Razviti metodologiju za detekciju i klasifikaciju objekata na temelju mase
- Implementirati sustav koji koristi polje vaga za klasifikaciju objekata – postavljanje operativnog sustava i izrada programskog okruženja
- Testirati i evaluirati sustav na skupu objekata različite mase

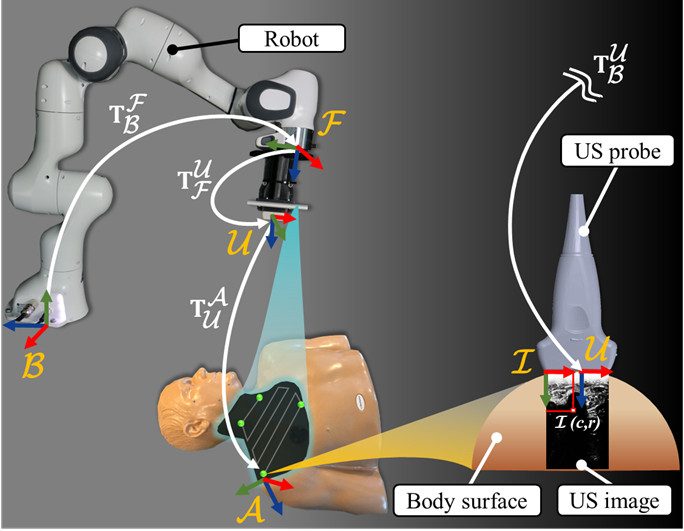
Kalibracija ultrazvučnih sondi s robotskom rukom u medicinskim primjenama
Cilj ovog završnog rada je razviti i implementirati metode kalibracije koje omogućuju preciznu integraciju ultrazvučnih sondi s robotskom rukom, koristeći se 2D slikama dobivenima ultrazvukom. Rad se fokusira na dvije vrste ultrazvučnih sondi: biplanarnu i linearnu, s ciljem određivanja i izračunavanja transformacije između koordinatnog sustava prirubnice robota i koordinatnog sustava ultrazvučne sonde. Za potrebe ovog rada koristi se medicinski ultrazvuk, industrijska robotska ruka i računalo za obradu podataka.
Razvoj i evaluacija PI, PD i PID kontrolera za upravljanje redundantnom robotskom rukom
U okviru ovog rada potrebno je detaljno proučiti mogućnosti i performanse Franka Control Interface-a (FCI), sučelja koje omogućuje brzu i izravnu dvosmjernu komunikaciju niske razine s robotskom rukom i šakom. FCI pruža mogućnost kontrole u stvarnom vremenu s frekvencijom od 1 kHz, što ga čini idealnim za istraživanje i implementaciju novih shema planiranja i upravljanja na niskoj razini. Zadatak uključuje programiranje robota u C++ jeziku kako bi se ostvarilo upravljanje kretanjem robotske ruke koristeći različite načine upravljanja (PI, PD, PID) prema zadanom profilu kretnje vrha alata. Specifični ciljevi rada su:
Razviti C++ programe koji implementiraju PI, PD, i PID načine upravljanja za kretanje vrha alata robotske ruke prema zadanom profilu kretnje.
Izvesti eksperimentalne testove kako bi se odzivi sistema dobiveni primjenom različitih načina upravljanja usporedili s teoretski projektiranim odzivima.
Usporediti performanse PI, PD, i PID načina upravljanja u kontekstu preciznosti pratećeg odziva, vremena ustaljenja, i prekoračenja.
Analizirati i diskutirati prednosti i nedostatke svakog pristupa upravljanja u kontekstu specifičnih aplikacija robotskih ruku.
U praktičnom dijelu rada, potrebno je za razvijene aplikacije oblikovati i izraditi sve potrebne robotske alate i druge konstrukcijske elemente koji će se koristiti u eksperimentima. Rad će biti validiran na opremi u CRTA-i, gdje će biti demonstrirano kretanje robotske ruke na osnovu razvijenih programa.

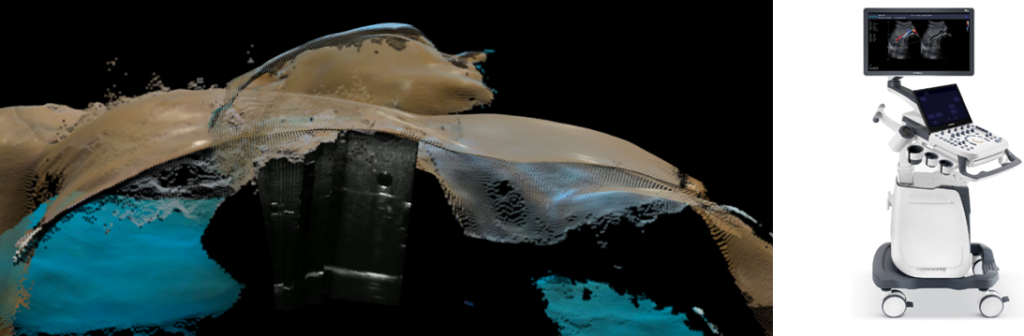
Konverzija i obrada ultrazvučnih slika u medicinskoj robotici
Razviti metodologiju za snimanje slike s ekrana ultrazvučnog uređaja, koristeći odabrane predefinirane postavke. Ovaj proces treba uključivati softverske alate koji mogu efikasno snimiti (detektirati) slike na ekranu i automatski ih pretvoriti u OpenCV Mat format za daljnju obradu i analizu. Konverzija treba osigurati očuvanje kvalitete slike, omogućavajući preciznu vizualizaciju ultrazvučnih podataka. Softverska rješenja trebaju biti optimizirana za brzu obradu, uz minimalan gubitak informacija tijekom konverzije.
Projekt zahtijeva poznavanje C++ programiranja, OpenCV biblioteke, i razumijevanje mehanike robotskih ruku i ultrazvučnih sondi, teži ka integraciji i automatizaciji procesa snimanja za unaprjeđenje medicinskih postupaka.
Robotic Systems for Pipeline Inspection
The food, process, and many other industries utilize various types of pipelines for the transportation of formless substances such as gases, liquids, powders, and more. Due to the nature of the transported materials, the inner walls of these pipelines can become contaminated, necessitating a defined cleaning and maintenance plan. The cleaning process can be manual, mechanized, or automated/robotized. Cleaning pipelines is a time-consuming and costly task that typically requires human involvement. For this reason, robotic systems are actively being developed to navigate through challenging pipelines and perform useful tasks.
In this thesis, it is necessary to conduct a thorough review of available scientific and technical literature by searching databases such as Scopus, IEEE, Google Scholar, and patent databases. The analysis should focus on existing robotic solutions for navigating through pipelines with internal diameters ranging from 70 to 150 mm. For a given imitation of a 40m long pipeline with an internal diameter of 90 mm, it is required to propose a conceptual solution for a mobile robot utilizing existing and/or novel technical approaches.
During the conceptual development of the robot, it is necessary to utilize as many standard mechanical, electromechanical, propulsion, power, sensor, and control components as possible.
All sufficiently detailed components of the mobile robot concept can be manufactured using 3D printing technology available at CRTA.
For more details on this topic, please contact doc. dr. sc. Marko Švaco.
Matematičko modeliranje, identifikacija parametara i upravljanje mobilnim robotom s diferencijalnim pogonom
Kod većine mobilnih robota diferencijalne strukture zakoni upravljanja uglavnom su temeljeni samo na kinematičkom modelu robota. Međutim, kod gibanja velikim brzinama i prijenosa teškog tereta bitno je u obzir uzeti dinamiku robota i pogonskih motora. Zbog toga je u takvim slučajevima važno izvesti potpuni matematički model i provesti identifikaciju parametara kao nužnom preduvjetu za sintezu i praktičnu implementaciju upravljačkih zakona ove klase sustava.
U radu je potrebno:
- Izvesti potpuni matematički model mobilnog robota diferencijalne strukture s uključenom dinamikom i kinematikom robota te dinamikom aktuatora.
- Prethodno izvedeni matematički model napisati u obliku linearnog regresijskog modela s obzirom na parametre mobilnog robota. Zatim na mobilnom robotu diferencijalne kinematike u Laboratoriju za autonomne sustave (CRTA) provesti eksperimentalna mjerenja primjenom vanjskog mjernog sustava OptiTrack u svrhu identifikacije parametara robota.
- Načiniti simulacijske modele u odgovarajućem matematičkom programskom alatu u kojima će se direktno numerički rješavati diferencijalne jednadžbe primjenom ugrađenih funkcija.
- Na temelju simulacija provesti sintezu PID regulatora kojim će se osigurati željena brzina kotača robota. Provesti simulacije za različite ulazne/referentne brzine te komentirati odzive.
- Razmotriti mogućnosti implementacije prethodno dizajniranog PID regulatora na mobilnom robotu diferencijalne kinematike u Laboratoriju za autonomne sustave (CRTA).
Za više detalja o ovoj temi javiti se izv. prof. Vladimiru Miliću i asistentu Branimiru Ćaranu.
Application of RFID in Transportation Systems
Workpiece carriers on transport systems are used in many different manufacturing processes. The carriers hold items in position during transport, production and inspection. They are usually assigned to specific objects. Therefore, it is possible to use carriers for their identification and tracking of process steps. The workpieces must be identified automatically and without errors using the carrier. This identification must be possible at different points in the plant for decentralized control of the process sequence. The individual production steps must be coordinated with each other. At the same time, the goal is to create conditions for complete traceability of individual steps. The solution is to apply the RFID tag in a suitable place, for example, on the underside of the carrier. RFID read/write heads are mounted on the relevant processing stations. The RFID system ensures secure identification of the carrier. Since the RFID tag can be written, its dataset can be supplemented at each station with information about the steps in the process performed. This information can be used to manage switches or to initiate specific production processes. Tags can also store quality data.Workpiece carriers on transport systems are used in many different manufacturing processes. The carriers hold items in position during transport, production and inspection. They are usually assigned to specific objects. Therefore, it is possible to use carriers for their identification and tracking of process steps. The workpieces must be identified automatically and without errors using the carrier. This identification must be possible at different points in the plant for decentralized control of the process sequence. The individual production steps must be coordinated with each other. At the same time, the goal is to create conditions for complete traceability of individual steps. The solution is to apply the RFID tag in a suitable place, for example, on the underside of the carrier. RFID read/write heads are mounted on the relevant processing stations. The RFID system ensures secure identification of the carrier. Since the RFID tag can be written, its dataset can be supplemented at each station with information about the steps in the process performed. This information can be used to manage switches or to initiate specific production processes. Tags can also store quality data. The RFID system ensures secure identification of the carrier. Since the RFID tag can be written, its data set can be supplemented at each station with information about the performed process steps. This information can be used to manage switches or to initiate specific production processes. Tags can also store quality data. As part of this thesis, it is necessary to apply the SIMATIC RF300 RFID PROFINET system on the laboratory transport system.
For more details on this topic, please contact dr.sc. Bojan Šekoranja.
Application of Soft Grippers for Object Manipulation
Soft grippers find their application in robotics when handling delicate objects. The advantage of soft grippers is that they can adapt to different objects through their shape or other features. To explore the capabilities of different soft grippers in this thesis, it is necessary to do:
- detailed review and analysis of soft grippers used in industry,
- on the existing robot in the Laboratory for Autonomous Systems, it is necessary to validate the operation of at least three available soft grippers (mGripTM , piSOFTGRIP® i FlexShapeGripper),
- propose, design and create an experimental set-up and scenario for handling at least five different objects by the selected robot using three different soft grippers,
- code robotic tools and enable automatic change of soft grippers using a standard tool changer available in the laboratory.
For the developed application of the robot, it is necessary to design and manufacture (3D print, modular aluminum profiles, etc.) all necessary robot tools, flanges, supports and other structural elements. The thesis must be validated on the equipment in the Autonomous Systems Laboratory.
For more details on this topic, please contact doc. dr. sc. Marko Švaco.
Application of Robot Operating System (ROS2) on a Mobile Robot in the Gazebo Virtual Environment
The Robot Operating System (ROS) is a hugely popular environment within the academic robotics community. In recent years, there has been an increasing presence of ROS in the industry, leading to a need for its improvement. As ROS was initially developed as an environment for researchers, and therefore, it may not be sufficiently robust for industrial applications, the community started developing ROS2. ROS2 is the second version of ROS that was developed with the aim of better and more robust implementation in the mobile and industrial robot industry. The main emphasis on the ROS2 environment is real-time performance, robustness and system security.
In this thesis, it is necessary:
- to examine in detail ROS2, its possibilities and its application and to compare with ROS,
- to research and implement algorithms developed for ROS in the ROS2 environment,
- in the Gazebo simulator, build as detailed as possible the virtual environment of the Laboratory for Artificial Intelligence in CRTA,
- using the ROS2 environment, add a mobile robot to the Gazebo simulator and form the ability to handle it,
- to implement existing algorithms for mapping and localization of a mobile robot.
For more details on this topic, please contact doc. dr. sc. Marko Švaco and Ph.D Branimir Ćaran.
Integration of the Robot Operating System (ROS) on the Waypoint Robotics VECTOR Mobile Robot
The Waypoint Robotics VECTOR is a mobile robot with four Swedish wheels set at 45 degrees (mecanum wheels). The robot is controlled through a web service by connecting to the robot's IP address and assigning tasks such as mapping, localization, navigation, and mission solving. Due to the impracticality of such an implementation and the desire to integrate a robotic arm onto the robot in the near future, the task of this undergraduate thesis is to:
- establish communication with the robot using rosbridge node in ROS
- enable sending speed commands and reading sensor status in ROS,
- implement algorithms for mapping and localization,
- to implement a robot navigation algorithm in mapped space,
- prepare the system for the integration of the robotic arm.
For more details on this topic, please contact doc. dr. sc. Marko Švaco and Ph.D Branimir Ćaran.
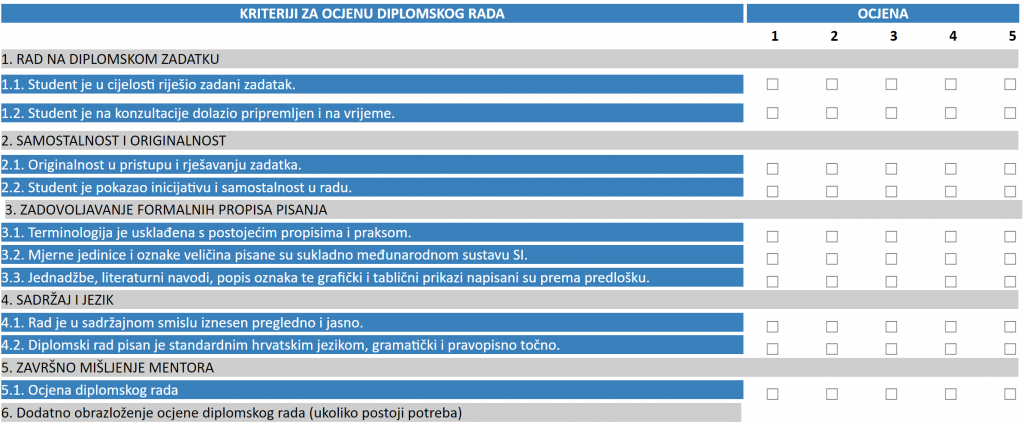
The undergraduate theses must be written according to the official guidelines of the FMENA. The grade of the mentor and comentor is formed by adherence to formal regulations and directions, but more importantly by work on the undergraduate thesis, independence, and originality. In addition to the individual grade of the undergraduate thesis, a grade is also awarded during the presentation in front of the committee.
Pozivamo sve studentice i studente da obavezno pročitaju sva rules and instructions vezane uz izradu završnih radova. Za upute za izradu prezentacije završnog rada obratite se izravno vašem mentoru.
The website was co-financed by the European Union from the European Regional Development Fund.
The content of the website is the sole responsibility of the Faculty of Mechanical Engineering and Naval Architecture.