Must read: brief instructions and rules
For all students interested in the final and diploma theses completed so far at CRTA, they can view them. here and here. All papers written in the old laboratory were defended before 2021. All papers from 2021 and 2022 were written and implemented in CRTA. Students who choose a topic for their paper are expected to be actively engaged and work responsibly on the assigned topic. All students who choose to work on one of the topics offered below will be provided with all necessary equipment, as well as workplaces and a (shared) computer in the laboratory and/or practicums. If the paper includes an experimental part, students will be able to work in the corresponding laboratory where the experiments will be performed: Autonomous Systems Laboratory, Medical Robotics Laboratory or Computational Intelligence Laboratory. In addition to working in laboratories, all students also have access to two practicums, the schedule of which can be seen here. While working in the laboratories and practicums, students must adhere to all rules of behavior as well as rules for the use of the computer, laboratory, and other equipment. After work, it is necessary to leave the workstations in CRTA clean and tidy.
In addition to laboratories and laboratory equipment, in the student section of CRTA, students have their 3D printers, various student tools, and equipment that are necessary for a large number of topics that include practical experimental work.
For any general questions and experiences, you can always reach out to our current students, graduates, or demonstrators.
What is a “Project” and how is it related to a thesis?
The project from the 9th semester of study that precedes the registration of the diploma thesis is a necessary prerequisite for registering the topic of the diploma thesis if the mentor or co-mentor is a teacher from CRTA. The topic of the project is closely related to the topic of the diploma thesis and forms a whole with the diploma thesis. When registering the project in Studomat, it is necessary to agree with the future mentor or co-mentor on the scope of the Project. The project usually includes solving certain parts of the topic of the diploma thesis (one part of the entries from each topic described below). The project is submitted to the mentor (and co-mentor) in digital form.
Writing and submitting the paper
Final and diploma theses must be written in accordance with the official instructions and templates found here. Before writing a paper, it is necessary to study all materials in detail and contact the mentor or co-mentor with any questions.
Before starting writing, it is recommended to agree on the structure of the paper with the mentor or co-author. Given the selected deadline for submitting the paper, the fully written paper must be submitted to the mentor or co-author for reading (Word and PDF versions) by email at least 10 days before the official deadline for submission. The paper sent for reading must be complete and spell-checked (it is mandatory to check the correct me).
Criteria for evaluating papers
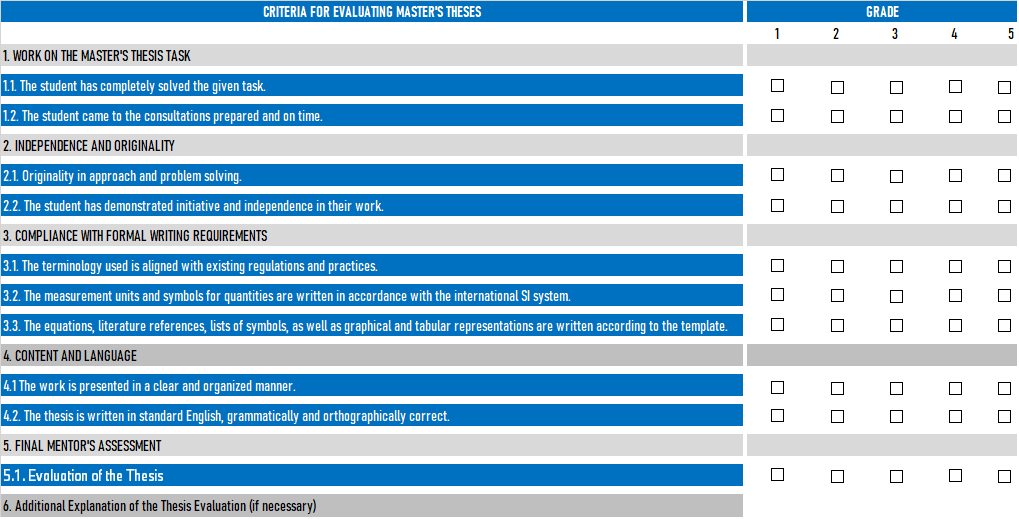
Final and diploma theses must be written according to all official instructions of the FSB. In accordance with compliance with formal rules and instructions, and especially the work on the final/diploma thesis, independence and originality, the grade of the mentor and co-mentor is formed. In addition to the individual grade of the work, a grade is assigned for the presentation of the work during the presentation before the committee.
Mentors and assistants

Assoc. prof. Marko Švaco
Associate Professor, Head of CRTA

Assist. prof. Bojan Šekoranja
Assistant professor

Assist prof. Filip Šuligoj
Assistant professor

Branimir Ćaran
Teaching assistant and PhD student

Tara Knežević
Teaching assistant and PhD student
Available topics
Assoc. prof. Marko Švaco (Click to expand)
Students who wish to acquire specific engineering knowledge and practical experience in the fields of industrial robotics, autonomous systems, medical robotics, and the application of artificial intelligence are recommended to review previous mentored final and diploma theses available in the repository of the Dabar Faculty of Mechanical Engineering and Naval Architecture (link, you need to confirm that you are not a robot).
Given the interdisciplinary nature of the projects and activities carried out at the Regional Center of Excellence for Robotic Technologies (CRTA), the topics typically involve work with modern equipment and are often directly related to active scientific projects and/or collaboration with industry. By reviewing previous works, students can gain insight into the tools used, such as ROS, simulation environments, UI methods, etc., as well as the methodologies for developing and applying hardware and software, and the level of complexity of individual tasks.
Students are invited to identify the area of their interest or propose their own topic based on these examples and the areas of possible topics listed below, and contact them by e-mail for consultation about a potential topic.
Areas
1. Industrial robotics, digital twins and smart production
In this area, you will deal with the comprehensive field of smart industry, robotics and automation. Topics include bridging the virtual world (simulation) and real robotic systems. Works often include programming industrial robots (robotic arms) and designing and developing flexible robotic cells for specific tasks. Students have the opportunity to develop digital twins using tools such as Roboguide, RoboDK, ROS, Isaac Sim, CoppeliaSim, etc. Certain topics include basic applications of collaborative robots in industry, manipulation of moving objects on conveyor belts (conveyor tracking), integration of vision systems for quality control and robot guidance.
2. Medical robotics
Students in this field apply engineering knowledge to improve medical procedures. The work in this field focuses on patient safety and the development of methods, tools, and robotic procedures that assist surgeons, drawing on experience from current and successfully completed projects. projects medical robotics at CRTA.
Topics include the following selected areas:
- Instrument navigation based on medical images (CT/MRI)
- Robotic and image-guided operations
- Design and development of specialized tools for medical robots
- Development of robotic exoskeletons for rehabilitation or support
- Specific areas related to current research projects
3. Autonomous mobile robots
This area is intended for students interested in how robots autonomously perform tasks such as simultaneous localization and mapping (SLAM), path planning, and spatial navigation. In addition to robotic systems, the area also includes the application and development of multi-sensor fusion so that robots can reliably estimate their position in the environment.
Autonomous mobile systems encompass a wide range of platforms, including classic mobile wheeled robots, unmanned aerial vehicles (drones), walking robots, and mobile manipulators.
Topics include the following selected areas:
- Simultaneous localization and mapping (SLAM).
- Path planning and dynamic obstacle avoidance.
- Autonomous navigation and tracking of paths or trajectories.
- Fusion of several types of sensors (odometry, IMU, LiDAR, GPS, camera).
Skills required in this area: Python, C++, ROS.
4. Design of robotic systems and prototypes
This is the most "hardware" intensive area, ideal for students with an interest in CAD, mechatronics and prototyping. Here, as a rule, existing robots are not exclusively used, but new robotic systems are designed and developed for specific tasks and unstructured environments.
Topics include the following selected areas:
- Design and manufacturing of robots with specific kinematics (parallel robots, climbing robots, etc.)
- Development of robots for movement on vertical surfaces (inspection of columns, walls, bridges, viaducts)
- Design of mechatronic modules, grippers and actuator systems
- Robotics in difficult and specific conditions (e.g. pipeline inspection)
5. Educational robotic systems
This area includes the possibility of designing and experimentally validating various technical and other problems (challenges) in visually attractive displays that will serve to promote robotics and high technologies. Such displays are planned to be used when promoting the Faculty, the Study Program and CRTA as part of various events such as the University Fair, the Science Festival and other various festivals and events. Examples of topics and areas include:
- Designing a robotic system for the game tic-tac-toe (match four, etc.)
- Designing a robotic system for autonomously assembling the Towers of Hanoi
- Designing a robotic system for autonomously solving Rubik's Cubes
- Or solving similar challenges
Available BSc topics
- Application of Soft Grippers for Object Manipulation
- Robotic Systems for Pipeline Inspection
Available MSc topics
- Executing advanced missions using the KUKA KMR iiwa robot and the Robot Operating System (ROS2)
- Development of an end-effector for physical human-robot interaction and physiotherapy
- Development of an interactive setup for the game of Tic-Tac-Toe
- Simulation framework for a mobile wall-climbing robot
- Multimodal sensor and fusion testing platform
- CAD model development for mass reduction of a wall-climbing robot
- Mathematical modeling, parameter identification and control of a mobile robot with differential drive
A detailed description of the available topics can be found in document.
You can find previous works of this mentor here here.
Assist prof. Filip Šuligoj (Click to expand)
Students who want to develop competencies in the areas of machine vision, robotic perceptions, artificial intelligence and medical robotics It is recommended to review previous final and diploma theses available in the repository of the Faculty of Mechanical Engineering and Naval Architecture.
By reviewing earlier works, students can get to know research directions, used methods and concrete engineering applications and on this basis propose your own specific topic or choose one of the offered topics.
Areas
1. Machine vision algorithms and 3D perception
In this area, students develop methods for acquisition, processing and interpretation of 2D and 3D data from different sensors — RGB-D cameras, stereo systems, laser and ultrasonic sensors.
Algorithms are being researched for:
- 3D reconstruction and segmentation objects
- visual tracking and detection in dynamic scenes
- robust localization and registration in areas with multiple sensors
- analysis of surfaces and geometric features for the purpose of industrial inspection or medical diagnostics
Applications include automatic quality control in industry, monitoring and manipulation of objects, and registration and navigation in medical robotics, for example in robot-guided acquisition of ultrasound images or segmentation of anatomical structures.
2. Machine learning and neural networks
The second area is focused on application and development of machine learning and artificial intelligence methods in the interpretation of vision data and optimization of robot work.
Includes:
- convolutional neural networks (CNN) for classification, detection and semantic segmentation
- generation of synthetic data sets and augmentation for model training
- learning in real and simulated environments for human-robot interaction
The results of this research have direct application in automated production processes, smart medical instruments and assistive robotics systems.
3. Sensor integration and calibration of vision-robotic systems
The third area includes merging perception and management through the development of integrated vision-sensor platforms.
Students are engaged in:
- extrinsic and intrinsic calibration of cameras, lasers and ultrasound probes
- by synchronizing sensors and multimodal data fusion
- visual servo control and adaptive controllers based on feedback from vision sensors
- designing and evaluating robotic systems who learn and adapt to real working conditions
Available BSc topics
- Development of a software application for recognizing and recording dart game results using computer vision
- Spatial correction and positioning of the casting using a robotic system with a touch probe
- Visual spatial registration and orientation of a casting using an in-hand 3D camera for robotic processing
Available MSc topics
- Detection of dart key points using convolutional neural networks
- Facial feature detection and automatic alignment of 3D head models in medical images
- Reconstruction and segmentation of a three-dimensional ultrasound volume based on robotically guided images of a medical phantom
You can find a detailed description of the available topics at presentation.
You can find previous works of this mentor here here.
Assist. prof. Bojan Šekoranja (Click to expand)
Students interested in developing competencies in the areas of artificial intelligence, autonomous systems, robot perception, human biomechanics, medical robotics, and human-robot interaction (HRI) have the opportunity to systematically upgrade their knowledge and skills through work in a research environment.
Through exposure to specific technologies, including experimental platforms such as Frank Emik and UR5/UR10 robots, autonomous mobile robots (AGV/AMR), motion capture systems, EMG and eye-tracking equipment, and autonomous drones, students gain practical experience and understanding of key algorithms and methods needed to develop advanced intelligent mechatronic systems.
In addition, students have the opportunity to participate in research and development projects of laboratories and industrial partners, where they can work on current applications of artificial intelligence, autonomous navigation, multimodal perception and collaborative robotics, and contribute to the development of new technologies through final and diploma theses.
Areas
1. Artificial intelligence and machine learning in human-robot interaction
This area encompasses the development of AI models for understanding and predicting human intent, classification and regression of sensor data, anomaly detection, and adaptive control of robotic systems in contact with humans.
Research focus:
- classification and regression algorithms for emg, forces, movement and gaze
- multimodal signal fusion for human intention prediction and anticipatory robot control
- detection of anomalies and unexpected behaviors in human-robot interaction
- sim2real model transfer in hri systems
- predictive models of forces and contact behavior
Examples of topics:
- multimodal prediction of human intention (emg + gaze + movement)
- detection of anomalies in human-robot contact
- predictive ai models for force control and cooperative manipulation
2. BHuman iomechanics, EMG analysis and personalized load models, stochastic state assessment and force control in HRI
Physiological and biomechanical processes in human-robot interaction are investigated, and workload, fatigue and quality of cooperation are assessed. The goal is to enable robots to assess the condition of humans and the environment in real time and make safe and adaptive management decisions.
Research focus:
- collection and analysis of EMG signals
- personalized biomechanical models of the upper extremities
- estimation of muscle fatigue and load in cooperation tasks
- bayesian filters (ekf, ukf, particle filters)
- assessment of hidden user states (movement phase, force, tremor)
- stochastic force and impedance control
- contact prediction and detection of dangerous situations
Examples of topics:
- assessment of muscle load and fatigue during collaborative manipulation and the impact of the robot's adaptive strategy on human biomechanics
- stochastic control in physical interaction
- control model with three levels of assistance for adaptive robot behavior in physical interaction with humans (phri)
3. Medical robotics, robotic assistance in surgery and medical navigation
This area encompasses the development of advanced mechatronic and software solutions for medical robotic systems, including robotic assistance in minimally invasive procedures, navigation procedures, surgical planning, and multimodal perception. Students work on the development of technologies used in modern medical robots such as the RONNA system (neurosurgery), robotic biopsy systems, dental and orthopedic applications, and systems for medical positioning and patient monitoring.
Research focus:
- robotic assistance in minimally invasive procedures (e.g. neurosurgery, biopsy, orthopedics)
- computer processing of medical images (CT/MRI/US) and segmentation, detection of anatomical digits (landmarks)
- planning and simulation of surgical procedures (trajectories, access points, tissue constraints)
- medical navigation and tool tracking (optical tracking / markerless tracking)
- sensor and robot calibration algorithms (hand-eye, tool-eye, robot-patient)
- safety protocols in medical robotics (fail-safe, motion constraints)
- AI assistants for surgeons (prediction of tissue movement, guidance, warnings)
- precise control of robots under the constraints of working space and patient safety
Examples of topics:
- automatic target structure segmentation from ct/mri data for robotic navigation
- detection of surgical instruments and tracking of markers in real time
- planning the optimal needle trajectory for stereotactic biopsy
- simulation of a surgical procedure with the aim of optimizing the robot's workspace while limiting forces and tissue stiffness
- development of tools/end effectors for precise surgical robots
4. Autonomous systems, robotic perception and motion planning
This area deals with the development of algorithms for perception, localization, predictive motion planning, and environmental monitoring, including human movement analysis in space, crowd control, anomalous behavior detection, and risk assessment. Systems developed in this area are applicable to mobile robots, drones, security surveillance systems, and robotic systems that share space with humans.
Research focus:
- visual and lidar localization (slam, vio, multi-sensor fusion)
- autonomous mapping and navigation in complex environments
- route planning (rrt*, prm, a*, kinematic planning)
- obstacle avoidance and predictive motion models
- shared autonomy
- autonomous return, security protocols and geo-restrictions
- people surveillance, crowd behavior analysis and movement pattern detection
- stochastic planning under uncertainty
Examples of topics:
- slam for an autonomous drone in outdoor environments
- drone navigation with a combination of gps, vision and imu
- flight planning for autonomous perimeter security surveillance
- detection and analysis of crowd behavior anomalies for an autonomous drone, as well as a system for recognizing risky situations
- an interface for coordinating a fleet of autonomous drones and a human-in-the-loop strategy for intervention drones
- stochastic planning of robot movement through crowds under uncertainty
You can find previous works of this mentor here here.

The website was co-financed by the European Union from the European Regional Development Fund.
The content of the website is the sole responsibility of the Faculty of Mechanical Engineering and Naval Architecture.