Verfügbare Themen für Masterarbeiten
Unbedingt lesen: Kurzanleitung und Regeln
Für alle Studentinnen und Studenten, die sich für bisher im CRTA erstellte Diplomarbeiten interessieren, können die Arbeiten hier eingesehen werden. Alle Diplomarbeiten, die im Rahmen des alten Labors erstellt wurden, wurden vor 2021 verteidigt. Alle Arbeiten aus den Jahren 2021 und 2022 wurden im und implementiert im CRTA erstellt. Von den Studentinnen und Studenten, die ein Diplomarbeitsthema auswählen, wird ein aktives Engagement und eine verantwortungsvolle Arbeit zum vorgegebenen Thema erwartet. Allen Studierenden, die eine Diplomarbeit zu einem der unten angebotenen Themen auswählen, wird die gesamte notwendige Ausrüstung sowie Arbeitsplätze und (geteilte) Computer im Labor und/oder in den Praktika zur Verfügung gestellt. Wenn die Diplomarbeit auch einen experimentellen Teil umfasst, wird den Studierenden die Arbeit im entsprechenden Labor ermöglicht, in dem die Experimente durchgeführt werden: Labor für autonome Systeme, Labor für medizinische Robotik oder Labor für Computerintelligenz. Zusätzlich zur Arbeit in den Laboren stehen allen Studierenden auch zwei Praktika zur Verfügung, deren Belegungsplan hier eingesehen werden kann. Bei der Arbeit in Laboren und Praktika sind von den Studierenden alle Verhaltensregeln sowie die Regeln für den Umgang mit Computern, Labor- und sonstigen Geräten einzuhalten. Nach der Arbeit sind die Arbeitsplätze im CRTA stets sauber und aufgeräumt zu hinterlassen.
Zusätzlich zu den Laboren und der Laborausrüstung stehen den Studierenden im Studierendenbereich des CRTA 3D-Drucker, verschiedene Werkzeuge und Ausrüstungen zur Verfügung, die für eine Vielzahl von Themen, die praktische und experimentelle Arbeiten umfassen, erforderlich sind.
Der Forscher Luka Rabuzin ist für die Arbeit mit Studenten- und anderen Tools verantwortlich und Luka führt Sie in alle Regeln ein, wenn Sie mit der Arbeit an Ihrem Thema beginnen.
Bezüglich einiger allgemeiner Fragen und Erfahrungen von Studierenden können Sie sich jederzeit an unsere aktuellen Studierenden, Absolventen oder Demos wenden.
Was ist ein "Projekt" und wie ist es mit der Diplomarbeit verbunden?
Das Projekt aus dem 9. Semester des Studiums, das der Anmeldung der Diplomarbeit vorausgeht, ist eine notwendige Voraussetzung für die Anmeldung des Diplomarbeitsthemas, wenn der Betreuer oder Co-Betreuer ein Dozent aus dem CRTA ist. Das Projektthema ist eng mit dem Thema der Diplomarbeit verbunden und bildet eine Einheit mit der Diplomarbeit. Bei der Anmeldung des Projekts im Studomat ist es notwendig, sich mit dem zukünftigen Betreuer oder Co-Betreuer über den Umfang des Projekts zu einigen. Das Projekt umfasst in der Regel die Bearbeitung bestimmter Teile des Diplomarbeitsthemas (ein Teil der Stichpunkte aus jedem der unten beschriebenen Themen). Das Projekt wird dem Betreuer (und Co-Betreuer) in digitaler Form übergeben.
Schreiben und Einreichen der Diplomarbeit
Die Diplomarbeit ist gemäß den offiziellen Anweisungen und der Vorlage für Diplomarbeiten zu schreiben, die zu finden sind Hier. Vor dem Schreiben der Diplomarbeit müssen alle Materialien gründlich studiert werden, und bei Fragen sollte der Betreuer oder Co-Betreuer kontaktiert werden.
Vor Beginn des Schreibens wird empfohlen, die Struktur der Arbeit mit dem Betreuer oder Co-Betreuer abzustimmen. Angesichts des gewählten Abgabetermins der Diplomarbeit muss die vollständig geschriebene Diplomarbeit dem Betreuer oder Co-Betreuer zur Durchsicht (Word- und PDF-Versionen) per E-Mail mindestens 10 Tage vor dem offiziellen Abgabetermin eingereicht werden. Die zur Durchsicht eingereichte Diplomarbeit muss vollständig und orthografisch korrekt sein (unbedingt eine Überprüfung auf Korrigiere mich).
Liste der verfügbaren Themen
- Entwicklung eines Endeffektors für die physische Mensch-Roboter-Interaktion und Physiotherapie
- Steuerung eines robotischen medizinischen Bohrers und Experimente zum Bohren von Schädelknochen (für weitere Informationen wenden Sie sich an Doz. Ph. D. Marko Švaco)
- Steuerung eines robotischen medizinischen Bohrers und Experimente zum Bohren von Schädelknochen (für weitere Informationen wenden Sie sich an Doz. Ph. D. Marko Švaco)
- Steuerung einer Flotte mobiler Roboter in einer ROS2-Umgebung
- Entwicklung einer interaktiven Ausstellung für das Tic-Tac-Toe-Spiel
- Autonomes Laden von Elektrofahrzeugen mit einem Roboterarm
- Zweihändige Montage eines Sicherungsgehäuses
- Robotisches Handling von Objekten im ungeordneten Zustand
- Ausführung fortschrittlicher Missionen mit dem KUKA KMR iiwa Roboter und dem Robot Operating System (ROS2) – besetzt
Liste der Themen 2023/2024 – Doz. Ph.D. Filip Šuligoj
- —(reserviert)—Extrinsische Kalibrierung eines robotischen In-Hand-Stereovisionssystems mit neuronalen Netzen
- Schätzung der Kopfposition des Patienten in 3D-CT-Bildern mit Anwendung in der robotisierten Neurochirurgie
- —(reserviert)—Kraftregelung mit einem robotischen System zur Interaktion mit gekrümmten Oberflächen
- —(reserviert)—Integration von Methoden des maschinellen Sehens und Lernens zur automatisierten Erkennung, Lokalisierung und Verifizierung von Mikroprozessorplatinen
- —(reserviert)—Robotersystem zur autonomen Navigation und Manipulation von Objekten
- Automatisierung der extrinsischen Kalibrierung des "Auge-in-Hand"-Robotersystems
- Entwicklung und Implementierung eines Systems zur Kontrolle und Überwachung der Verpackung mit Integration von Wägesystemen und Bildverarbeitungssystemen
Wenn Sie sich für einen Bereich oder ein Thema interessieren, das nicht empfohlen wird, zögern Sie nicht Sie können eigene Themen, Ideen und Projekte vorschlagen an einen der CRTA-Mitarbeiter, und dann können Sie sich mit einem potenziellen Mentor und/oder Kommentator und Mitarbeitern des Themas auf den Vorschlag Ihres Themas einigen. Bei weiteren Fragen wenden Sie sich bitte per E-Mail an die für ein bestimmtes Thema zuständige Lehrkraft oder kommen Sie während der Beratung vorbei.
Detaillierte Beschreibung der verfügbaren Themen
Extrinsische Kalibrierung eines robotischen In-Hand-Stereovisionssystems mit neuronalen Netzen
Diese Arbeit untersucht die Verwendung neuronaler Netze zur extrinsischen Kalibrierung eines robotischen In-Hand-Stereovisionssystems, das für die präzise Lokalisierung im Raum entscheidend ist. Diese Systeme finden Anwendung in der Industrie, Medizin und wissenschaftlichen Forschung. Konventionelle Kalibrierungsmethoden sind oft suboptimal aufgrund von Herausforderungen wie Rauschen und optischen Nichtlinearitäten. Die Arbeit schlägt eine nichtparametrische Kalibrierung auf Basis neuronaler Netze vor, die die Robustheit und Flexibilität des Systems erhöht und die Automatisierung des Prozesses ermöglicht, wodurch die Effizienz und Geschwindigkeit der Kalibrierung verbessert werden.
In der Arbeit wird ein bestehendes Stereovisionssystem mit Makroobjektiven und einem automatischen Algorithmus zur präzisen Lokalisierung retroreflektiver Kugeln verwendet. Das Stereovisionssystem soll bei inkrementellen Bewegungen des Roboterarms zu vorgegebenen Positionen strukturiert die 3D-Positionen des Roboters und die Pixelkoordinaten der Zentren der lokalisierten Kugeln speichern, die zusammen den Kalibrierungstrainingssatz für das neuronale Netzwerk bilden.
Die Forschung umfasst die folgenden Schritte:
- Den Roboter und die Kommunikation mit dem Stereovisionssystem für das Verfahren zur Erstellung des Kalibrierungsdatensatzes programmieren
- Die Größe und Konfiguration des Satzes für das Training des neuronalen Netzes vorschlagen (zur Lokalisierung werden retroreflektive Referenzkugeln verwendet)
- Untersuchen und implementieren Sie Modelle neuronaler Netze, die die Koordinaten der Kugelzentren in den Bildern des Stereovisionssystems effektiv mit den bekannten 3D-Positionen des Roboters verknüpfen können.
- Den Einfluss verschiedener Modelle und Parameter neuronaler Netze auf die Genauigkeit und Robustheit der Kalibrierung evaluieren
- Die Genauigkeit der extrinsischen Kalibrierung mithilfe des neuronalen Netzes validieren, indem Positionen verwendet werden, die nicht Teil des Trainingssatzes waren, und die euklidische Fehlerberechnung (bekannt und erwartet) durchgeführt wird.
Die Arbeit sollte einen Überblick über die relevante Literatur enthalten und die verwendeten Methoden und Algorithmen detailliert beschreiben sowie die Bewertung der erzielten Ergebnisse im Kontext der Anwendbarkeit in realen Anwendungen. Es ist auch notwendig, die verwendete Literatur sowie gegebenenfalls erhaltene Hilfe von Mentoren oder Mitarbeitern anzugeben.
Für weitere Details zu diesem Thema wenden Sie sich bitte an Ph.D. Filip Šuligoj.
Schätzung der Kopfposition des Patienten in 3D-CT-Bildern mit Anwendung in der robotisierten Neurochirurgie
Die Arbeit konzentriert sich auf die robuste Schätzung der Kopfposition des Patienten in 3D-CT-Aufnahmen, was im Kontext der zunehmenden Automatisierung und des Einsatzes von Robotern in der Neurochirurgie von entscheidender Bedeutung ist. Stereotaktische Gehirnoperationen, die immer häufiger mit Hilfe von Robotern durchgeführt werden, erfordern eine hohe Präzision bei der Lokalisierung von Tumoren und anderen pathologischen Zuständen. Die Schätzung der Kopfposition wird daher zu einem Schlüsselelement für den Erfolg solcher chirurgischen Eingriffe. Obwohl Informationen über die Kopfposition oft als Metadaten im DICOM-Format verfügbar sind, ist ihre bestätigte Genauigkeit aufgrund der klinischen Auswirkungen von entscheidender Bedeutung.
Die Methodologie der Forschung umfasst:
- Entwicklung und Implementierung von Algorithmen zur präzisen Schätzung der Kopfposition basierend auf der geometrischen Analyse von Gesichtszügen und anthropomorphen Orientierungspunkten (z.B. Nase, Augen).
- Anwendung und Bewertung verschiedener Methoden, einschließlich der Analyse von Eigenwerten und der Filterung biomedizinischer Bilder basierend auf Hounsfield-Werten für Gewebe unterschiedlicher Dichte.
- Vergleich und Analyse der Genauigkeit und Robustheit verschiedener Ansätze, mit besonderem Fokus auf deren Anwendbarkeit in der robotisierten Neurochirurgie.
- Validierung der Methoden unter Verwendung unabhängiger, realer (anonymisierter) CT-Aufnahmen des menschlichen Kopfes.
Die Arbeit wird einen umfassenden Überblick über die relevante Literatur, eine detaillierte Beschreibung der verwendeten Methoden und Algorithmen sowie eine Bewertung der erzielten Ergebnisse in Bezug auf ihre klinische Anwendbarkeit umfassen. In der Arbeit ist es notwendig, die verwendete Literatur sowie gegebenenfalls erhaltene Hilfe von Mentoren oder Mitarbeitern anzugeben.
Für weitere Details zu diesem Thema wenden Sie sich bitte an Ph.D. Filip Šuligoj.
Kraftregelung mit einem Robotersystem zur Interaktion mit gekrümmten Oberflächen
Die Funktionalität der Kraftregelung wird in der modernen Robotik immer bedeutender, wo von Robotern nicht nur die Fähigkeit zur visuellen Wahrnehmung ihrer Umgebung erwartet wird, sondern auch eine fortschrittliche Interaktion mit dieser. Dies umfasst die Fähigkeit des Roboters, verschiedene physikalische Parameter wie Kraft und Moment in Echtzeit zu interpretieren und darauf zu reagieren. Diese Art der Interaktion ermöglicht es Robotern, sich angemessen an komplexe und dynamische Umgebungen anzupassen, was für zukünftige Anwendungen in der Industrie, im Gesundheitswesen und in anderen Sektoren von entscheidender Bedeutung ist.
Für diesen Zweck wird in der Arbeit vorgeschlagen, ROS2 (Robot Operating System 2) zu verwenden, das die Integration und Steuerung verschiedener Geräte und deren Funktionalitäten ermöglicht. Als Hardware-Komponente wird der Franka Panda Roboter in Kombination mit der Realsense D435 Tiefenkamera verwendet.
Die Forschungsaufgaben umfassen:
1. Entwurf eines anpassungsfähigen Roboterwerkzeugs (Tiefenkamera in der Hand und sphärisches Endwerkzeug), das an den vorhandenen Greifer und das gekrümmte Werkstück montiert werden kann.
2. Verwendung von ROS2 zur Integration der Funktionalitäten und Steuerung des Roboters sowie zur Erfassung von Punktwolken-Daten.
3. Implementierung einer Kraftsteuerung, um einen konstanten Kontakt mit der gekrümmten Oberfläche aufrechtzuerhalten.
4. Erstellung eines Szenarios, in dem der Roboter ein Werkzeug entlang eines linearen Pfads bewegt, der auf Basis einer mit einer Tiefenkamera erfassten Punktwolke geplant wurde, wobei er über eine gekrümmte Oberfläche eine konstante Kraft aufrechterhält.
5. Ergebnisanalyse, insbesondere der Genauigkeit bei der Aufrechterhaltung konstanter Kraft und der geplanten Trajektorie. Die Arbeit wird einen detaillierten Überblick über die für die Kraftkontrolle und Visualisierung in der Robotik relevante Literatur enthalten. Außerdem werden die Methoden und Algorithmen beschrieben, die für die Implementierung der Regelungskonzepte und die Punktwolkenerfassung verwendet wurden. Eine Evaluierung wird durchgeführt, um die Genauigkeit und Robustheit der implementierten Kraftregelung auf gekrümmten Oberflächen zu bestimmen. In der Arbeit sind die verwendete Literatur sowie gegebenenfalls erhaltene Unterstützung durch den Betreuer oder Kollaborateure anzugeben.
Für weitere Details zu diesem Thema wenden Sie sich bitte an Ph.D. Filip Šuligoj.
Integration von Methoden des maschinellen Sehens und des Lernens für die automatisierte Erkennung, Lokalisierung und Verifizierung von Mikrocontroller-Platinen
Im Kontext der rasanten technologischen Entwicklung und der Massenproduktion hochentwickelter elektronischer Komponenten bleibt die Qualitätskontrolle eine Herausforderung und wirtschaftlich anspruchsvoll. Insbesondere die Bildverarbeitung, die Kameratechnologie zur Informationsgewinnung nutzt, hat sich zu einem entscheidenden Werkzeug in industriellen Kontrollprozessen entwickelt. In dieser Arbeit integrieren wir eine Kombination aus Bildverarbeitung und maschinellem Lernen, konkret neuronale Netze, für die Qualitätskontrolle von Mikrocontroller-Platinen.
Die spezifischen Forschungsaufgaben umfassen:
- Bildaufnahme der genannten Mikrocontroller-Platinen unter verschiedenen Beleuchtungs- und Orientierungsbedingungen unter Verwendung einer Industriekamera.
- Annotation und Erstellung von Datensätzen für das Training neuronaler Netze.
- Anwendung von YOLO (You Only Look Once) neuronalen Netzwerk- und Bildverarbeitungsalgorithmen zur Erkennung, Lokalisierung und Überprüfung von Elementen auf verschiedenen Mikroprozessorplatinen wie Arduino UNO, Jetson NX Xavier, Raspberry Pi, STM32 und UP-Board.
- Analyse und Bewertung der Modellleistung unter verschiedenen Bedingungen mit Schwerpunkt auf der Robustheit des Modells im Kontext von Variationen in der Ausrichtung, Objektschäden und Lichtverhältnissen.
In der Arbeit ist es notwendig, die verwendete Literatur und etwaige Hilfe eines Mentors oder Mitarbeiters anzugeben.
Für weitere Details zu diesem Thema wenden Sie sich bitte an Ph.D. Filip Šuligoj.
Robotersystem zur autonomen Navigation und Manipulation von Objekten
Im Kontext der Entwicklung autonomer Robotersysteme für Industrie- und Logistikanwendungen konzentriert sich dieser Beitrag auf die Integration einer autonomen mobilen Plattform mit einem Roboterarm. Zur spezifischen Hardware gehören die mobile Roboterplattform Waypoint Vector, ein Frank Emik Panda-Roboterarm mit Controller, ein USV-Stromversorgungssystem und ein Computer. Diese Konfiguration bietet neue Möglichkeiten zur Automatisierung verschiedener Aufgaben, die die Navigation und Manipulation von Objekten erfordern.
Die konkreten Aufgaben der Forschung sind wie folgt:
- Design, Montage und Verbindung aller physischen Systemkomponenten, einschließlich mobiler Plattform, Roboterarm, USV und Computer.
- Konfiguration der ROS-Umgebung und deren Integration mit allen physischen Systemkomponenten.
- Demonstration der Fähigkeit der mobilen Plattform, sich autonom zu mehreren physischen Standorten innerhalb des Labors (im CRTA-Bereich) zu bewegen.
- Demonstration der Ausführung der Palettieraufgabe durch den Roboterarm an ausgewählten Standorten.
- Analyse und Bewertung der Systemleistung zur Bestätigung der Robustheit und Effizienz der vorgeschlagenen Implementierung.
In der Arbeit ist es notwendig, relevante Literatur und Methoden zu zitieren und mögliche Hilfe von Mentoren oder Mitarbeitern zu erwähnen.
Für weitere Details zu diesem Thema wenden Sie sich bitte an Ph.D. Filip Šuligoj.
Automatisierung der extrinsischen Kalibrierung des "Auge-in-Hand"-Robotersystems
Angesichts der allgegenwärtigen Anwendung von Robotersystemen in Industrie und Forschung konzentriert sich dieser Artikel auf die Entwicklung und Implementierung eines automatischen Systems zur Kalibrierung der räumlichen Beziehung zwischen einem Roboterarm und einem eingebetteten 3D-Vision-System. Genauer gesagt besteht das Ziel darin, die Transformationsmatrix zwischen dem Roboterflansch und dem Koordinatensystem der 3D-Kamera zu berechnen, was in der „Auge-in-Hand“-Konfiguration als extrinsische Kalibrierung bezeichnet wird.
Zu den konkreten Aufgaben der Abschlussarbeit gehören:
- Überprüfung und Implementierung von Kalibrierungsmethoden: Untersuchung und Analyse bestehender Methoden zur extrinsischen Kalibrierung mit Implementierung der ausgewählten Methode.
- Entwurf und Herstellung einer 3D-Kamerahalterung: Entwurf und Herstellung einer Halterung, die die Montage der 3D-Kamera am Flansch des Roboterarms ermöglicht.
- Konfiguration der Betriebs- und Entwicklungsumgebung: Installation und Einrichtung der notwendigen Softwareumgebung, einschließlich Betriebssystem und Entwicklungstools, für eine effektive Systemkommunikation und -steuerung.
- Einrichtung eines Kommunikationsprotokolls: Entwicklung und Test eines Kommunikationsprotokolls zwischen Roboter, Computer und 3D-Vision-System.
- Erstellung des Kalibrierverfahrens und -programms: Entwicklung einer Softwarelösung, die in Kombination mit dem Kalibrierobjekt den Prozess der 3D-Kamerakalibrierung automatisiert.
- Bewertung der Kalibrierungsgenauigkeit: Durchführung experimenteller Messungen und Analysen zur Bestimmung der Genauigkeit und Robustheit des implementierten Kalibrierungsprozesses.
In der Arbeit ist es notwendig, relevante Literatur und Methoden zu zitieren und mögliche Hilfe von Mentoren oder Mitarbeitern zu erwähnen.
Für weitere Details zu diesem Thema wenden Sie sich bitte an Ph.D. Filip Šuligoj.
Entwicklung und Implementierung eines Systems zur Kontrolle und Überwachung der Verpackung mit Integration von Wägesystemen und Bildverarbeitungssystemen
Ziel dieser Arbeit ist die Entwicklung eines autonomen Systems zur Steuerung und Überwachung (ASCP), das Waagen und Bildverarbeitungssysteme zur präzisen Erkennung und Vermessung von Objekten im Rahmen von „Pick and Pack“-Vorgängen effizient kombiniert. Das System wird Tiefenkameras (Stereokameras) zur visuellen Erkennung von Objekten und Sensoren zur Massenmessung verwenden. Der Schwerpunkt liegt auf der Entwicklung von Programmen in C++ zur Objekterkennung mithilfe des YOLO-Algorithmus und auf der Integration mit Wägelogik.
Spezifische Aufgaben
Design der Benutzeroberfläche: Erstellen einer intuitiven Benutzeroberfläche für die Interaktion mit dem Bildverarbeitungssystem und den Waagen.
Training des YOLO-Modells zur Erkennung: Sammlung und Annotation von Daten für das Training des YOLO-Modells unter Verwendung von Stereokameras, um Tiefeninformationen zu erhalten.
Implementierung des YOLO-Modells in C++: Einbindung des trainierten YOLO-Modells in ein in C++ entwickeltes Programm-Framework zur Echtzeit-Objekterkennung.
Integration der Wägelogik: Entwicklung eines Algorithmus, der die von der Waage erhaltenen Informationen mit den erkannten Objekten verknüpft und prüft, ob Masse und Identität des Objekts konsistent sind.
Testen und Evaluieren: Durchführung von Systemtests unter verschiedenen Bedingungen und Analyse der Ergebnisse, um die Genauigkeit und Robustheit der implementierten Algorithmen zu überprüfen.
Methodik
Die Entwicklung erfolgt mit der Programmiersprache C++ und relevanten Bibliotheken zur Bild- und Sensordatenverarbeitung. Für das Training des YOLO-Modells wird ein annotierter Datensatz verwendet, während zum Testen und Bewerten reale Objekte und Bedingungen verwendet werden.
Literatur und Zusammenarbeit
Es ist notwendig, in der Arbeit relevante Literatur und Methoden zu zitieren. Auch die mögliche Hilfe oder Kooperation von Mentoren oder Mitarbeitern sollte erwähnt werden.
Für weitere Details zu diesem Thema wenden Sie sich bitte an Ph.D. Filip Šuligoj.
Entwicklung eines Endeffektors für die physische Mensch-Roboter-Interaktion und Physiotherapie
Sprache der Masterarbeit: Englisch
Mentor: Asst. Ph.D. Marko Švaco
Kommentator: Asst. Ph.D. Tadej Petrič – Homepage
Muskel-Skelett-Erkrankungen (MSE) werden als die Pandemie der modernen Welt bezeichnet. Sie machen die Mehrzahl aller anerkannten Krankheiten in der Europäischen Union aus und verursachen jedes Jahr Millionen von Arbeitsausfalltagen. Muskel-Skelett-Erkrankungen sind Weichteilverletzungen, die durch plötzliche Stöße, Krafteinwirkung, Vibrationen und unausgeglichene Körperhaltungen verursacht werden. Die Behandlung von Muskel-Skelett-Erkrankungen wurde in mehreren Leitlinien für die klinische Praxis zusammengefasst.
Im Rahmen dieser Arbeit soll eine detaillierte State-of-the-Art-Analyse aktiver Projekte und Forschung im Bereich der Roboterphysiotherapie durchgeführt werden. Alle Arten der Physiotherapie sollten untersucht werden, wie z. B. Körperkontakt, Massage, Ultraschall, Wärme usw.
Im Rahmen der Arbeit soll ein Prototyp eines Roboter-Endeffektors auf Basis der menschlichen Hand erforscht, entwickelt und im Labor für Medizinrobotik am CRTA an einem Roboterarm mit Positions- und Impedanzkontrolle getestet werden.
Diese Aufgabe beschreibt die Untersuchung der Biomechanik und der Anatomie einer menschlichen Hand (Handfläche, Finger, Daumen, Faust), die in der Physiotherapie verwendet wird. Der entwickelte Endeffektor des kollaborativen Roboters soll in einem Labormodellszenario therapeutische Bewegungen reproduzieren und Kräfte auf einen Menschen ausüben. Wichtige mechanische (Steifigkeit, Härte, Elastizität usw.) und physikalische Eigenschaften (induzierter Druck, Temperatur, Reibung usw.) sollten gemessen werden, um einen hochwirksamen Endeffektor zu entwickeln.
Für weitere Details zu diesem Thema wenden Sie sich bitte an Doz. Ph.D. Marko Švaco.
Zweihändige Montage eines Sicherungsgehäuses
Der Einsatz von Zweihand-Industrierobotern wird immer häufiger eingesetzt, da er eine deutliche Erweiterung der Möglichkeiten im Vergleich zu Roboterarbeitsplätzen mit einem Roboterarm ermöglicht. Im Rahmen des Computer-Intelligence-Labors gibt es ein Zweihand-Robotersystem mit 15 Bewegungsfreiheitsgraden, zwei 2D-Industriekameras, Werkzeugwechslern, Greifern und einem Arbeitstisch mit einem Industrieprodukt – einem Sicherungskasten. Mit dem Ziel einer vollständigen Automatisierung und Robotisierung des Montageprozesses des Sicherungsgehäuses mit dem vorhandenen Zweihandroboter CSDA10F von Yaskawa ist Folgendes erforderlich:
- das Bildverarbeitungssystem (Hardware und Software) neu zu gestalten und zu verbessern und es robust und funktionsfähig zu machen,
- Neugestaltung und Verbesserung der Roboterwerkzeuge, Werkzeugregale, Magazine, Paletten, Nester und Lieferschienen, die für die Vorbereitung und Positionierung der eingebauten Elemente des Sicherungskastens verwendet werden,
- einen Algorithmus zum Erlernen der Standardanordnung von Sicherungen und Relais basierend auf 2D-Wahrnehmung und Bildverarbeitung entwickeln,
- Programmieren Sie den Prozess der autonomen Montage des Sicherungskastens gemäß dem erlernten Zeitplan aus dem vorherigen Punkt.
- Erstellen Sie eine einfache grafische Oberfläche zur Steuerung der Roboterstation.
- Entwickeln und implementieren Sie einen Algorithmus zur Qualitätskontrolle (Verifizierung) des zusammengebauten Sicherungsgehäuses.
Die Arbeit muss an der Ausrüstung im Computer Intelligence Laboratory validiert werden. Für die entwickelte Anwendung ist es notwendig, alle notwendigen strukturellen, mechatronischen und sonstigen Elemente/Komponenten zu entwerfen und herzustellen. Die Demonstration an den Geräten im Labor sollte im automatischen Betriebsmodus über die Benutzeroberfläche ermöglicht werden.
Für weitere Einzelheiten zu diesem Thema wenden Sie sich bitte an Assoc. Ph.D. Marko Švaco und Ph.D Josip Vidaković.
Robotisches Handling von Objekten im ungeordneten Zustand
Industrieroboter werden zunehmend in unstrukturierten frühen Umgebungen eingesetzt, in denen das Ziel darin besteht, Objekte zu handhaben, für die alle sechs Bewegungsfreiheitsgrade (drei Translationen und drei Rotationen) unbekannt sind. Im Labor für autonome Systeme am CRTA gilt es auf dem bestehenden Versuchsaufbau das Problem der Teileentnahme aus der Box mithilfe eines stationären industriellen 3D-Vision-Systems zu lösen. Als Vorrecherche ist es notwendig, die bisher verfassten studentischen Arbeiten zu ähnlichen Themen zu studieren. Im Rahmen dieser Arbeit ist es notwendig:
- die notwendigen Konstruktions- und Programmierlösungen für den automatischen Werkzeugwechsel am Roboter erstellen,
- ein Werkzeug zur Kalibrierung des Bildverarbeitungssystems und des Roboterarms erstellen,
- Wählen Sie mindestens neun Arbeitsobjekte unterschiedlicher Form (Kasten, Zylinder, Scheibe, flach usw.) und unterschiedlicher Größe aus.
- Für ausgewählte Themen ist es erforderlich, alle verfügbaren Funktionen zur 3D-Erkennung und -Lokalisierung zu untersuchen, zu implementieren und zu beschreiben.
Die Arbeit muss an den Geräten im Autonomous Systems Laboratory validiert werden. Für die entwickelte Anwendung ist es notwendig, alle notwendigen strukturellen, mechatronischen und sonstigen Elemente/Komponenten mit den im Labor verfügbaren Geräten zu entwerfen und herzustellen. Die Demonstration an Geräten im Labor soll im automatischen Betriebsmodus über eine beliebige Benutzeroberfläche ermöglicht werden.
Für weitere Details zu diesem Thema wenden Sie sich bitte an Doz. Ph.D. Marko Švaco.
Fortgeschrittene Missionen mit Robotern durchführen HAKEN KMR iiwa und Roboter-Betriebssystem (ROS2)
Ein mobiler Roboter HAKEN KMR iiwa verfügt über die Möglichkeit der Programmierung und Implementierung mithilfe der KUKA Sunrise-Umgebung. Die Sunrise-Umgebung erfordert Roboterprogrammierung in der Programmiersprache JAVA, die für Robotikingenieure nicht so praktisch ist wie Python oder C++. Daher wurde an einer norwegischen Universität eine Schnittstelle entwickelt, die die Steuerung eines mobilen Roboters und das Auslesen seiner Sensoren mithilfe der ermöglicht ROS2-Umgebung. Neben der einfachen Möglichkeit, Programme in der ROS2-Umgebung zu schreiben, besteht die Besonderheit von ROS2 darin, dass es die Möglichkeit bietet, andere Algorithmen zur Kartierung, Lokalisierung und Navigation im Raum anzuwenden, nicht nur die von KUKA. Der mobile KUKA KMR-Roboter enthält auch den industriellen kollaborativen Roboter KUKA iiwa, der zusammen mit dem MoveIt-Paket auch die Möglichkeit der Implementierung in die ROS2-Umgebung bietet, was eine außergewöhnliche Flexibilität bei der Arbeit mit dem Roboter bietet. Im Rahmen der Arbeit ist es notwendig:
- die Kommunikation von ROS2 zum KUKA KMR-Roboter untersuchen und implementieren (Hardware-Schnittstelle)
- Untersuchen und implementieren Sie die Kommunikation von ROS2 zum KUKA iiwa-Roboter mithilfe des MoveIt-Pakets
- Wählen Sie die am besten geeigneten Algorithmen für die gleichzeitige Lokalisierung und Raumkartierung aus und implementieren Sie sie auf dem Roboter
- Wählen Sie den am besten geeigneten Algorithmus für die autonome Roboternavigation im Weltraum
- Definieren und ausführen Sie die Aufgabe, einen Gegenstand aufzunehmen, zu entfernen und an einem zuvor definierten Ort abzulegen
Für weitere Einzelheiten zu diesem Thema wenden Sie sich bitte an Assoc. Ph.D. Marko Švaco und Doktorand Branimir Ćaran.
Entwicklung einer interaktiven Ausstellung für das Tic-Tac-Toe-Spiel
Umgebungs- und motorische Intelligenz ermöglichen es Menschen, sich in vielen neuen Situationen zurechtzufinden und sich an sie anzupassen. Einer der Bereiche, in denen die Wahrnehmung der Umwelt und die menschliche Intelligenz im Vordergrund stehen, sind verschiedene Spiele. Eines der relativ einfachen Spiele ist das Tic-Tac-Toe-Spiel. Damit ein Robotersystem dieses Spiel gegen einen menschlichen Gegner spielen kann, müssen zahlreiche sensorische und motorische Fähigkeiten in das Robotersystem integriert werden. Die Wahrnehmung eines Gaming-Desktops ist eine anspruchsvolle Aufgabe, da die robuste Wahrnehmung durch eine Reihe variabler Parameter wie Richtung und Intensität des Lichts, Farbe, Dicke und Abmessung der „x“- und „o“-Markierungen auf dem Desktop beeinflusst wird ( Planke). Darüber hinaus ist die Planung der Bewegung eines Roboterarms keine triviale Aufgabe, da es notwendig ist, Kollisionen mit der Umgebung zu vermeiden und solche Bewegungen zu planen, die nicht durch Singularitäten verlaufen oder große Verzögerungen und Geschwindigkeiten einzelner Gelenke oder der Spitze des Roboters aufweisen Werkzeug. Für das bestehende Setup für das Tic-Tac-Toe-Spiel im Labor für autonome Systeme benötigen Sie:
- Analysieren Sie den Arbeitsbereich des Roboters mit dem Ziel, die effektive Spielfläche zu vergrößern.
- Analysieren und schlagen Sie ein neues Layout des Bildverarbeitungssystems (eine oder mehrere Kameras) vor, um eine robuste Wahrnehmung des Arbeitsbereichs des Spielbretts zu gewährleisten.
- einen Bildverarbeitungsalgorithmus entwickeln und implementieren, um die ebene Position des Spielfelds und die Spielzeichen „x“ und „o“ zu erkennen,
- Erstellen Sie eine grafische Benutzeroberfläche für die Interaktion mit dem Player und zum Starten der gesamten Anwendung
- Jede Roboterbewegung muss vor der Ausführung in einem Simulationssoftwarepaket wie RoboDK analysiert und überprüft werden.
- die notwendigen strukturellen, verwaltungstechnischen und sonstigen Änderungen am Versuchsaufbau vornehmen,
- Erstellen Sie ein Verfahren zur automatisierten Kalibrierung von Bildverarbeitungssystemen und Robotern.
Die Abschlussarbeit muss am bestehenden Aufbau mit dem UR5-Roboter im Labor für autonome Systeme am CRTA angefertigt werden.
Für weitere Einzelheiten zu diesem Thema wenden Sie sich bitte an Assoc. Ph.D. Mark Švaci und Ph.D Filip Šuligoj.
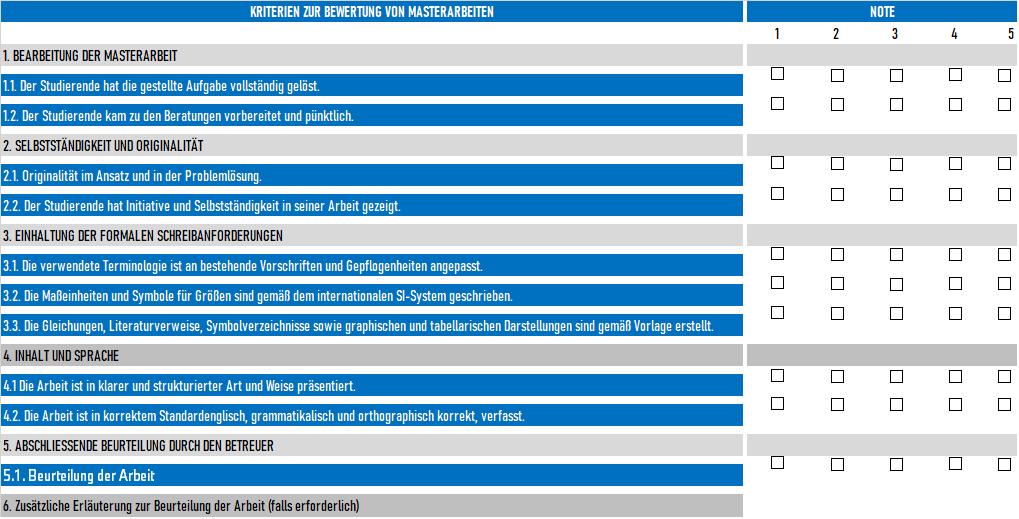
Bewertungskriterien für Abschlussarbeiten
Diplomarbeiten müssen nach allen offiziellen Anweisungen des FSB verfasst werden. Entsprechend der Einhaltung formeller Regeln und Weisungen und vor allem der Arbeit an der Diplomarbeit, Unabhängigkeit und Originalität bildet sich die Beurteilung des Betreuers und Kommentators. Zusätzlich zur Einzelnote der Abschlussarbeit wird im Rahmen der Präsentation vor der Kommission eine Note für die Präsentation der Abschlussarbeit vergeben.
Wir laden alle Studierenden ein, sie alle zu lesen Regeln und Anweisungen im Zusammenhang mit der Erstellung von Diplomarbeiten. Für Anweisungen zum Erstellen einer Abschlusspräsentation wenden Sie sich direkt an Ihren Mentor.
Die Erstellung der Website wurde von der Europäischen Union aus dem Europäischen Fonds für regionale Entwicklung kofinanziert.
Für den Inhalt der Website ist ausschließlich die Fakultät für Maschinenbau und Schiffbau verantwortlich.