Unbedingt lesen: Kurzanleitung und Regeln
Alle Studierenden, die sich für die bisher am CRTA erstellten Abschluss- und Diplomarbeiten interessieren, können diese einsehen. Hier Und Hier. Alle im alten Labor verfassten Arbeiten wurden vor 2021 verteidigt. Alle Arbeiten aus den Jahren 2021 und 2022 wurden im CRTA verfasst und durchgeführt. Von Studierenden, die ein Thema für ihre Arbeit wählen, wird erwartet, dass sie sich aktiv einbringen und verantwortungsbewusst an dem ihnen zugewiesenen Thema arbeiten. Allen Studierenden, die sich für eines der unten angebotenen Themen entscheiden, werden die notwendige Ausrüstung sowie Arbeitsplätze und ein (gemeinsam genutzter) Computer im Labor und/oder in den Praktikumsräumen zur Verfügung gestellt. Enthält die Arbeit einen experimentellen Teil, können die Studierenden im entsprechenden Labor arbeiten, in dem die Experimente durchgeführt werden: Labor für Autonome Systeme, Labor für Medizinische Robotik oder Labor für Computational Intelligence. Zusätzlich zur Laborarbeit haben alle Studierenden Zugang zu zwei Praktikumsräumen, deren Zeitplan hier eingesehen werden kann. Hier. Bei der Arbeit in Laboren und Praktika sind von den Studierenden alle Verhaltensregeln sowie die Regeln für den Umgang mit Computern, Labor- und sonstigen Geräten einzuhalten. Nach der Arbeit sind die Arbeitsplätze im CRTA stets sauber und aufgeräumt zu hinterlassen.
Zusätzlich zu den Laboren und der Laborausrüstung stehen den Studierenden im Studierendenbereich des CRTA 3D-Drucker, verschiedene Werkzeuge und Ausrüstungen zur Verfügung, die für eine Vielzahl von Themen, die praktische und experimentelle Arbeiten umfassen, erforderlich sind.
Bezüglich einiger allgemeiner Fragen und Erfahrungen von Studierenden können Sie sich jederzeit an unsere aktuellen Studierenden, Absolventen oder Demos wenden.
Was ist ein “Projekt” und in welchem Verhältnis steht es zu einer Abschlussarbeit?
Das Projekt aus dem 9. Studiensemester, das der Anmeldung zur Diplomarbeit vorausgeht, ist Voraussetzung für die Anmeldung des Themas der Diplomarbeit, sofern der Betreuer oder Mitbetreuer ein Dozent des CRTA ist. Das Projektthema ist eng mit dem Thema der Diplomarbeit verknüpft und bildet mit dieser eine Einheit. Bei der Anmeldung des Projekts in Studomat muss der Umfang des Projekts mit dem zukünftigen Betreuer oder Mitbetreuer abgestimmt werden. Das Projekt umfasst in der Regel die Bearbeitung bestimmter Teilaspekte des Themas der Diplomarbeit (jeweils ein Teil der unten beschriebenen Themenbereiche). Das Projekt wird dem Betreuer (und Mitbetreuer) digital eingereicht.
Verfassen und Einreichen der Arbeit
Abschlussarbeiten und Diplomarbeiten müssen gemäß den offiziellen Anweisungen und Vorlagen verfasst werden. Hier. Vor dem Verfassen einer Arbeit ist es notwendig, alle Materialien eingehend zu studieren und sich bei Fragen an den Mentor oder Co-Mentor zu wenden.
Vor Beginn des Schreibens empfiehlt es sich, die Struktur des Papers mit dem Betreuer oder Mitautor abzustimmen. Entsprechend der gewählten Abgabefrist muss das vollständig geschriebene Paper (als Word- und PDF-Datei) mindestens 10 Tage vor dem offiziellen Abgabetermin per E-Mail an den Betreuer oder Mitautor zur Durchsicht gesendet werden. Das zur Durchsicht eingesandte Paper muss vollständig und fehlerfrei sein (die Rechtschreibung muss überprüft werden). Korrigiere mich).
Kriterien für die Bewertung von wissenschaftlichen Arbeiten
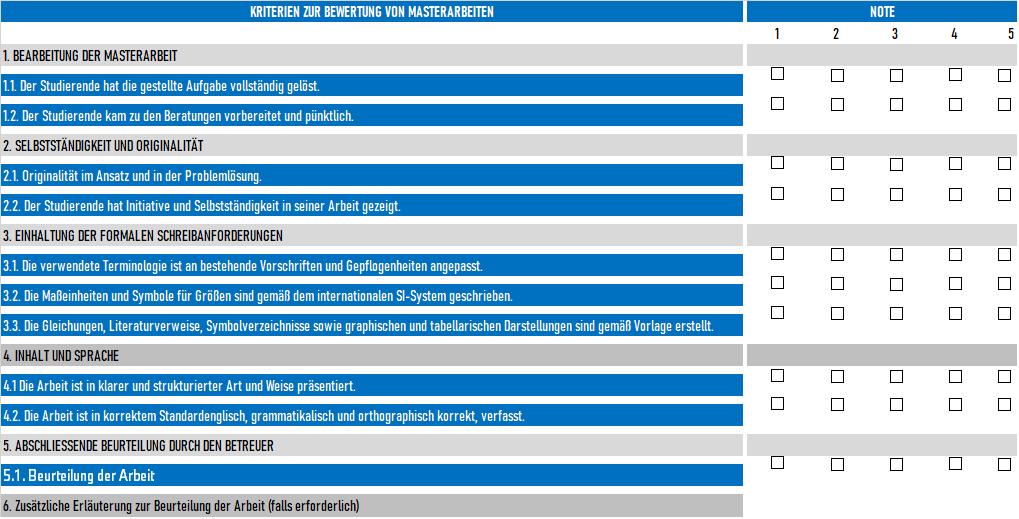
Abschluss- und Diplomarbeiten müssen gemäß den offiziellen Richtlinien der FSB verfasst werden. Die Benotung der Betreuer und Mitbetreuer erfolgt anhand der Einhaltung der formalen Regeln und Richtlinien, insbesondere der Qualität der Abschluss-/Diplomarbeit, sowie deren Selbstständigkeit und Originalität. Zusätzlich zur individuellen Note der Arbeit wird auch die Präsentation vor dem Prüfungsausschuss benotet.
Mentoren und Assistenten

außerordentlicher Prof. Dr. sc. Marko Švaco
Außerordentlicher Professor, Leiter des CRTA

Assistenzprofessor Bojan Šekoranja
Dozent

Assistenzprofessor Filip Šuligoj
Dozent

Branimir Ćaran
Assistent und Doktorand

Tara Knežević
Assistent und Doktorand
Verfügbare Themen
außerordentlicher Prof. Dr. sc. Marko Švaco (Zum Vergrößern klicken)
Studierenden, die sich spezifisches ingenieurwissenschaftliches Wissen und praktische Erfahrungen in den Bereichen Industrierobotik, autonome Systeme, Medizinrobotik und die Anwendung künstlicher Intelligenz aneignen möchten, wird empfohlen, frühere betreute Abschluss- und Diplomarbeiten im Repository der Dabar Fakultät für Maschinenbau und Schiffbau einzusehen.Link, Sie müssen bestätigen, dass Sie kein Roboter sind.
Aufgrund des interdisziplinären Charakters der Projekte und Aktivitäten am Regionalen Kompetenzzentrum für Robotertechnologien (CRTA) umfassen die Themen typischerweise die Arbeit mit moderner Ausrüstung und stehen oft in direktem Zusammenhang mit laufenden Forschungsprojekten und/oder der Zusammenarbeit mit der Industrie. Durch die Analyse bisheriger Arbeiten erhalten Studierende Einblicke in die verwendeten Werkzeuge wie ROS, Simulationsumgebungen, UI-Methoden usw. sowie in die Methodiken zur Entwicklung und Anwendung von Hard- und Software und den Komplexitätsgrad einzelner Aufgaben.
Die Studierenden sind eingeladen, sich ein Interessengebiet auszusuchen oder anhand dieser Beispiele und der unten aufgeführten möglichen Themenbereiche ein eigenes Thema vorzuschlagen und sich per E-Mail mit ihnen in Verbindung zu setzen, um ein potenzielles Thema zu besprechen.
Gebiete
1. Industrierobotik, digitale Zwillinge und intelligente Produktion
In diesem Bereich beschäftigen Sie sich mit dem umfassenden Feld der intelligenten Industrie, Robotik und Automatisierung. Themen sind unter anderem die Verbindung von virtueller Welt (Simulation) und realen Robotersystemen. Zu den Aufgaben gehören die Programmierung von Industrierobotern (Roboterarmen) sowie die Entwicklung flexibler Roboterzellen für spezifische Aufgaben. Studierende haben die Möglichkeit, digitale Zwillinge mithilfe von Tools wie Roboguide, RoboDK, ROS, Isaac Sim, CoppeliaSim usw. zu entwickeln. Weitere Themen sind grundlegende Anwendungen von kollaborativen Robotern in der Industrie, die Manipulation von Objekten auf Förderbändern (Förderbandverfolgung), die Integration von Bildverarbeitungssystemen für die Qualitätskontrolle und die Roboterführung.
2. Medizinische Robotik
Studierende dieses Fachbereichs wenden ingenieurwissenschaftliche Kenntnisse an, um medizinische Verfahren zu verbessern. Die Arbeit konzentriert sich auf die Patientensicherheit und die Entwicklung von Methoden, Werkzeugen und robotergestützten Verfahren zur Unterstützung von Chirurgen, wobei Erfahrungen aus laufenden und erfolgreich abgeschlossenen Projekten genutzt werden. Projekte Medizinische Robotik am CRTA.
Zu den Themen gehören unter anderem folgende ausgewählte Bereiche:
- Instrumentennavigation auf Basis medizinischer Bilder (CT/MRT)
- Robotergestützte und bildgesteuerte Operationen
- Konstruktion und Entwicklung spezialisierter Werkzeuge für medizinische Roboter
- Entwicklung von robotischen Exoskeletten für Rehabilitation oder Unterstützung
- Spezifische Bereiche im Zusammenhang mit aktuellen Forschungsprojekten
3. Autonome mobile Roboter
Dieser Bereich richtet sich an Studierende, die sich dafür interessieren, wie Roboter Aufgaben wie SLAM (Simultaneous Localization and Mapping), Pfadplanung und räumliche Navigation autonom ausführen. Neben Robotersystemen umfasst der Bereich auch die Anwendung und Entwicklung von Multisensorfusion, damit Roboter ihre Position in der Umgebung zuverlässig bestimmen können.
Autonome mobile Systeme umfassen eine breite Palette von Plattformen, darunter klassische mobile Radroboter, unbemannte Luftfahrzeuge (Drohnen), Laufroboter und mobile Manipulatoren.
Zu den Themen gehören unter anderem folgende ausgewählte Bereiche:
- Simultane Lokalisierung und Kartierung (SLAM).
- Pfadplanung und dynamische Hindernisvermeidung.
- Autonome Navigation und Verfolgung von Pfaden oder Trajektorien.
- Fusion verschiedener Sensortypen (Odometrie, IMU, LiDAR, GPS, Kamera).
Erforderliche Kenntnisse in diesem Bereich: Python, C++, ROS.
4. Entwurf von Robotersystemen und Prototypen
Dies ist der hardwareintensivste Bereich und ideal für Studierende mit Interesse an CAD, Mechatronik und Prototyping. Hier werden in der Regel nicht ausschließlich bestehende Roboter eingesetzt, sondern neue Robotersysteme für spezifische Aufgaben und unstrukturierte Umgebungen entwickelt und konstruiert.
Zu den Themen gehören unter anderem folgende ausgewählte Bereiche:
- Konstruktion und Fertigung von Robotern mit spezifischer Kinematik (Parallelroboter, Kletterroboter usw.).
- Entwicklung von Robotern zur Fortbewegung auf vertikalen Flächen (Inspektion von Säulen, Wänden, Brücken, Viadukten)
- Konstruktion von mechatronischen Modulen, Greifern und Aktuatorsystemen
- Robotik unter schwierigen und speziellen Bedingungen (z. B. Pipelineinspektion)
5. Bildungsrobotersysteme
Dieser Bereich umfasst die Möglichkeit, verschiedene technische und andere Probleme (Herausforderungen) in visuell ansprechenden Darstellungen zu konzipieren und experimentell zu validieren, um Robotik und Hochtechnologien zu fördern. Solche Darstellungen sollen im Rahmen verschiedener Veranstaltungen wie der Universitätsmesse, des Wissenschaftsfestivals und anderer Festivals und Events zur Präsentation der Fakultät, des Studiengangs und des CRTA eingesetzt werden. Beispiele für Themen und Bereiche sind:
- Entwicklung eines Robotersystems für das Spiel Tic-Tac-Toe (Vier-Gewinnt-Spiel usw.).
- Entwicklung eines Robotersystems für die autonome Montage der Türme von Hanoi
- Entwicklung eines Robotersystems zur autonomen Lösung von Zauberwürfeln
- Oder die Lösung ähnlicher Herausforderungen
Verfügbare Themen für Bachelorarbeiten
- Einsatz von Softgreifern zur Objektmanipulation
- Robotersysteme zur Prüfung von Rohrleitungen
Verfügbare Themen für Masterarbeiten
- Durchführung anspruchsvoller Missionen mit dem KUKA KMR iiwa-Roboter und dem Robot Operating System (ROS2)
- Entwicklung eines Endeffektors für die physische Mensch-Roboter-Interaktion und Physiotherapie
- Entwicklung einer interaktiven Ausstellung für das Tic-Tac-Toe-Spiel
- Simulationsframework für einen mobilen Wandkletterroboter
- Multimodale Sensor- und Fusionstestplattform
- CAD-Modellentwicklung zur Massenreduzierung eines Wandkletterroboters
- Mathematische Modellierung, Parameteridentifikation und Steuerung eines mobilen Roboters mit Differentialantrieb
Eine detaillierte Beschreibung der verfügbaren Themen finden Sie in dokumentieren.
Frühere Arbeiten dieses Mentors finden Sie hier. Hier.
Assistenzprofessor Filip Šuligoj (Zum Vergrößern klicken)
Studierende, die Kompetenzen in folgenden Bereichen entwickeln möchten: maschinelles Sehen, Roboterwahrnehmungen, künstliche Intelligenz Und medizinische Robotik Es wird empfohlen, frühere Abschluss- und Diplomarbeiten im Archiv der Fakultät für Maschinenbau und Schiffbau einzusehen.
Durch die Auseinandersetzung mit früheren Arbeiten können Studierende Forschungsrichtungen, angewandte Methoden und konkrete ingenieurwissenschaftliche Anwendungen kennenlernen und darauf aufbauend Schlagen Sie Ihr eigenes Thema vor. Oder wählen Sie eines der angebotenen Themen.
Gebiete
1. Algorithmen für maschinelles Sehen und 3D-Wahrnehmung
In diesem Bereich entwickeln Studierende Methoden für Erfassung, Verarbeitung und Interpretation von 2D- und 3D-Daten von verschiedenen Sensoren – RGB-D-Kameras, Stereosystemen, Laser- und Ultraschallsensoren.
Es werden Algorithmen erforscht für:
- 3D-Rekonstruktion und Segmentierung Objekte
- visuelle Verfolgung und Erkennung in dynamischen Szenen
- robuste Lokalisierung und Registrierung in Bereichen mit mehreren Sensoren
- Analyse von Oberflächen und geometrischen Merkmalen zum Zwecke der industriellen Inspektion oder der medizinischen Diagnostik
Anwendungsbereiche umfassen automatische Qualitätskontrolle in der Industrie, Überwachung und Manipulation von Objekten, Und Registrierung und Navigation in der medizinischen Robotik, zum Beispiel bei der robotergestützten Erfassung von Ultraschallbildern oder der Segmentierung anatomischer Strukturen.
2. Maschinelles Lernen und neuronale Netze
Der zweite Bereich konzentriert sich auf Anwendung und Entwicklung von Methoden des maschinellen Lernens und der künstlichen Intelligenz bei der Interpretation von Bilddaten und der Optimierung der Roboterarbeit.
Beinhaltet:
- Faltungsneuronale Netze (CNN) für Klassifizierung, Erkennung und semantische Segmentierung
- Erzeugung synthetischer Datensätze und Erweiterung für das Modelltraining
- Lernen in realen und simulierten Umgebungen für die Mensch-Roboter-Interaktion
Die Ergebnisse dieser Forschung haben direkte Anwendung in automatisierte Produktionsprozesse, intelligente medizinische Instrumente Und Assistenzrobotersysteme.
3. Sensorintegration und Kalibrierung von Bildverarbeitungs-Robotiksystemen
Der dritte Bereich umfasst Verschmelzung von Wahrnehmung und Management durch die Entwicklung integrierter Bildverarbeitungs- und Sensorplattformen.
Die Studierenden beschäftigen sich mit Folgendem:
- Extrinsische und intrinsische Kalibrierung von Kameras, Lasern und Ultraschallsonden
- Sensorsynchronisation Und multimodale Datenfusion
- visuelle Servosteuerung Und adaptive Regler basierend auf Rückmeldungen von Bildsensoren
- Entwurf und Bewertung von Robotersystemen die lernen und sich an die realen Arbeitsbedingungen anpassen
Verfügbare Themen für Bachelorarbeiten
- Entwicklung einer Softwareanwendung zur Erkennung und Aufzeichnung von Dartspielergebnissen mittels Computer Vision
- Räumliche Korrektur und Positionierung des Gussteils mithilfe eines Robotersystems mit Tastsensor
- Visuelle räumliche Registrierung und Orientierung eines Gussstücks mithilfe einer handgeführten 3D-Kamera für die Roboterverarbeitung
Verfügbare Themen für Masterarbeiten
- Erkennung von Schlüsselpunkten beim Dartpfeilschießen mithilfe von Faltungsneuronalen Netzen
- Gesichtserkennung und automatische Ausrichtung von 3D-Kopfmodellen in medizinischen Bildern
- Rekonstruktion und Segmentierung eines dreidimensionalen Ultraschallvolumens basierend auf robotergestützten Bildern eines medizinischen Phantoms
Eine detaillierte Beschreibung der verfügbaren Themen finden Sie unter Präsentation.
Frühere Arbeiten dieses Mentors finden Sie hier. Hier.
Assistenzprofessor Bojan Šekoranja (Zum Vergrößern klicken)
Studierende, die daran interessiert sind, Kompetenzen in den Bereichen künstliche Intelligenz, autonome Systeme, Roboterwahrnehmung, menschliche Biomechanik, medizinische Robotik und Mensch-Roboter-Interaktion (HRI) zu entwickeln, haben die Möglichkeit, ihr Wissen und ihre Fähigkeiten durch die Arbeit in einem Forschungsumfeld systematisch zu erweitern.
Durch die Auseinandersetzung mit spezifischen Technologien, darunter experimentelle Plattformen wie Frank Emik und UR5/UR10 Roboter, autonome mobile Roboter (AGV/AMR), Bewegungserfassungssysteme, EMG- und Blickverfolgungsgeräte sowie autonome Drohnen, erwerben die Studierenden praktische Erfahrungen und ein Verständnis für wichtige Algorithmen und Methoden, die zur Entwicklung fortschrittlicher intelligenter mechatronischer Systeme erforderlich sind.
Darüber hinaus haben die Studierenden die Möglichkeit, an Forschungs- und Entwicklungsprojekten von Laboren und Industriepartnern teilzunehmen, wo sie an aktuellen Anwendungen der künstlichen Intelligenz, der autonomen Navigation, der multimodalen Wahrnehmung und der kollaborativen Robotik arbeiten und durch Abschluss- und Diplomarbeiten zur Entwicklung neuer Technologien beitragen können.
Gebiete
1. Künstliche Intelligenz und maschinelles Lernen in der Mensch-Roboter-Interaktion
Dieser Bereich umfasst die Entwicklung von KI-Modellen zum Verstehen und Vorhersagen menschlicher Absichten, die Klassifizierung und Regression von Sensordaten, die Anomalieerkennung und die adaptive Steuerung von Robotersystemen im Kontakt mit Menschen.
Forschungsschwerpunkt:
- Klassifizierungs- und Regressionsalgorithmen für EMG, Kräfte, Bewegung und Blickrichtung
- Multimodale Signalfusion zur Vorhersage menschlicher Absichten und zur vorausschauenden Robotersteuerung
- Erkennung von Anomalien und unerwartetem Verhalten in der Mensch-Roboter-Interaktion
- Sim2Real-Modelltransfer in HRI-Systemen
- Vorhersagemodelle von Kräften und Kontaktverhalten
Beispiele für Themen:
- Multimodale Vorhersage menschlicher Intentionen (EMG + Blickrichtung + Bewegung)
- Erkennung von Anomalien im Mensch-Roboter-Kontakt
- prädiktive KI-Modelle für Kraftsteuerung und kooperative Manipulation
2. BMenschliche Iomechanik, EMG-Analyse und personalisierte Lastmodelle, stochastische Zustandsbewertung und Kraftregelung in der Mensch-Roboter-Interaktion
Es werden physiologische und biomechanische Prozesse in der Mensch-Roboter-Interaktion untersucht und Arbeitsbelastung, Ermüdung und Qualität der Zusammenarbeit bewertet. Ziel ist es, Roboter in die Lage zu versetzen, den Zustand von Menschen und ihrer Umgebung in Echtzeit zu erfassen und sichere sowie adaptive Managemententscheidungen zu treffen.
Forschungsschwerpunkt:
- Sammlung und Analyse von EMG-Signalen
- personalisierte biomechanische Modelle der oberen Extremitäten
- Abschätzung der Muskelermüdung und -belastung bei Kooperationsaufgaben
- Bayes'sche Filter (EKF, UKF, Partikelfilter)
- Beurteilung verborgener Benutzerzustände (Bewegungsphase, Kraft, Zittern)
- stochastische Kraft- und Impedanzsteuerung
- Kontaktvorhersage und Erkennung gefährlicher Situationen
Beispiele für Themen:
- Beurteilung der Muskelbelastung und -ermüdung bei kollaborativer Manipulation sowie der Auswirkungen der adaptiven Strategie des Roboters auf die menschliche Biomechanik
- stochastische Steuerung in der physikalischen Interaktion
- Kontrollmodell mit drei Unterstützungsstufen für adaptives Roboterverhalten in der physischen Interaktion mit Menschen (phri)
3. Medizinische Robotik, robotergestützte Chirurgie und medizinische Navigation
Dieser Bereich umfasst die Entwicklung fortschrittlicher mechatronischer und Softwarelösungen für medizinische Robotersysteme, darunter robotergestützte minimalinvasive Eingriffe, Navigationsverfahren, Operationsplanung und multimodale Wahrnehmung. Studierende arbeiten an der Entwicklung von Technologien für moderne medizinische Roboter wie das RONNA-System (Neurochirurgie), robotergestützte Biopsiesysteme, Anwendungen in der Zahnmedizin und Orthopädie sowie Systeme zur medizinischen Positionierung und Patientenüberwachung.
Forschungsschwerpunkt:
- Robotergestützte Eingriffe bei minimalinvasiven Verfahren (z. B. Neurochirurgie, Biopsie, Orthopädie)
- Computergestützte Verarbeitung medizinischer Bilder (CT/MRI/US) und Segmentierung, Erkennung anatomischer Finger (Landmarken)
- Planung und Simulation chirurgischer Eingriffe (Verlaufsbahnen, Zugangspunkte, Gewebebeschränkungen)
- Medizinische Navigation und Instrumentenverfolgung (optische Verfolgung / markerlose Verfolgung)
- Sensor- und Roboterkalibrierungsalgorithmen (Hand-Auge, Werkzeug-Auge, Roboter-Patient)
- Sicherheitsprotokolle in der medizinischen Robotik (Ausfallsicherheit, Bewegungsbeschränkungen)
- KI-Assistenten für Chirurgen (Vorhersage von Gewebebewegungen, Führung, Warnungen)
- Präzise Steuerung von Robotern unter den Einschränkungen des Arbeitsbereichs und der Patientensicherheit
Beispiele für Themen:
- automatische Zielstruktursegmentierung aus CT-/MRT-Daten für die Roboternavigation
- Erkennung von chirurgischen Instrumenten und Verfolgung von Markern in Echtzeit
- Planung der optimalen Nadeltrajektorie für die stereotaktische Biopsie
- Simulation eines chirurgischen Eingriffs mit dem Ziel, den Arbeitsbereich des Roboters zu optimieren und gleichzeitig Kräfte und Gewebesteifigkeit zu begrenzen
- Entwicklung von Werkzeugen/Endeffektoren für präzise chirurgische Roboter
4. Autonome Systeme, Roboterwahrnehmung und Bewegungsplanung
Dieser Bereich befasst sich mit der Entwicklung von Algorithmen für Wahrnehmung, Lokalisierung, prädiktive Bewegungsplanung und Umgebungsüberwachung, einschließlich der Analyse menschlicher Bewegungen im Raum, der Steuerung von Menschenmengen, der Erkennung von Anomalien und der Risikobewertung. Die in diesem Bereich entwickelten Systeme sind anwendbar auf mobile Roboter, Drohnen, Sicherheitsüberwachungssysteme und Robotersysteme, die sich den Raum mit Menschen teilen.
Forschungsschwerpunkt:
- Visuelle und Lidar-Lokalisierung (SLAM, VIO, Multisensorfusion)
- autonome Kartierung und Navigation in komplexen Umgebungen
- Routenplanung (rrt*, prm, a*, kinematische Planung)
- Hindernisvermeidungs- und prädiktive Bewegungsmodelle
- geteilte Autonomie
- autonome Rückkehr, Sicherheitsprotokolle und geografische Beschränkungen
- Personenüberwachung, Analyse des Verhaltens von Menschenmengen und Erkennung von Bewegungsmustern
- Stochastische Planung unter Unsicherheit
Beispiele für Themen:
- Kritik an einer autonomen Drohne in Außenumgebungen
- Drohnennavigation mit einer Kombination aus GPS, Bildverarbeitung und IMU
- Flugplanung für autonome Perimeterüberwachung
- Erkennung und Analyse von Anomalien im Verhalten von Menschenmengen für eine autonome Drohne sowie ein System zur Erkennung riskanter Situationen
- eine Schnittstelle zur Koordination einer Flotte autonomer Drohnen und eine Strategie mit menschlicher Interaktion für Interventionsdrohnen
- Stochastische Planung der Roboterbewegung durch Menschenmengen unter Unsicherheit
Frühere Arbeiten dieses Mentors finden Sie hier. Hier.

Die Erstellung der Website wurde von der Europäischen Union aus dem Europäischen Fonds für regionale Entwicklung kofinanziert.
Für den Inhalt der Website ist ausschließlich die Fakultät für Maschinenbau und Schiffbau verantwortlich.