Dostupne teme završnih radova
Popis dostupnih tema završnih radova
- Prepoznavanje govora i razumijevanja prirodnog jezika za manipulaciju robotskom rukom (rezervirano)
- Detekcija i klasifikacija objekata na temelju mase pomoću polja vaga
- Kalibracija ultrazvučnih sondi s robotskom rukom u medicinskim primjenama
- Razvoj i evaluacija PI, PD i PID kontrolera za upravljanje redundantnom robotskom rukom (rezervirano)
- Konverzija i obrada ultrazvučnih slika u medicinskoj robotici (rezerviran)
- Implementacija algoritma za analizu strukture podloge korištenjem dubinske kamere u mobilnoj robotici
- Matematičko modeliranje, identifikacija parametara i upravljanje mobilnim robotom s diferencijalnim pogonom (mentor izv. prof. Vladimir Milić)
- Primjena RFID-a na transportnom sustavu
- Primjena mekanih hvataljki za manipulaciju predmetima
- Integracija robotskog operativnog sustava (ROS) na mobilnom robotu Waypoint Robotics VECTOR
- Primjena RFID-a na transportnom sustav-u
- Robotski sustavi za ispitivanje cjevovoda (završeno, moguć nastavak)
Obavezno pročitati: kratke upute i pravila
Za sve studentice i studente koje zanimaju dosad napravljeni završni radovi u CRTA-i, radove mogu pogledati ovdje. Svi završni radovi napravljeni u sklopu starog laboratorija obranjeni su prije 2021. godine. Svi radovi od 2021. i 2022. godine napravljeni su u i implementirani u CRTA-i. Od studentica i studenata koji odaberu temu završnog rada očekuje se aktivan angažman te odgovoran rad na zadanoj temi. Svim studentima koji odaberu završni rad na jednu od dolje ponuđenih tema bit će osigurana sva potrebna oprema, te radna mjesta i (dijeljeno) računalo u laboratoriju i/ili praktikumima. Ukoliko završni rad uključuje i eksperimentalan dio, studentima će biti omogućen rad u pripadajućem laboratoriju u kojem će se izvoditi eksperimenti: Laboratorij za autonomne sustave, Laboratorij za medicinsku robotiku ili Laboratorij za računalnu inteligenciju. Uz rad u laboratorijima svim studentima su na raspolaganju i dva praktikuma čiji raspored zauzeća je moguće vidjeti ovdje. Prilikom rada u laboratorijima i praktikumima studentice i studenti se moraju pridržavati svih pravila ponašanja te pravila korištenja računalne, laboratorijske i ostale opreme. Nakon rada radna mjesta u CRTA-i potrebno je uvijek ostaviti čista i uredna.
Uz laboratorije i laboratorijsku opremu, u studentskom dijelu CRTA-e studentima su na raspolaganju 3D printeri, razni studentski alat u i oprema koji su nužni za veći broj tema koje uključuju i praktični eksperimentalni rad.
Za rad sa studentskim i ostalim alatom zadužen je istraživač Luka Rabuzin te će vas Luka uputiti u sva pravila kad počnete raditi na svojoj temi.
Vezano uz neka općenita pitanja i iskustva studenata uvijek se možete javiti našim trenutnim studentima, diplomantima ili demosima.
Pisanje i predaja završnog rada
Završni rad potrebno je pisati u skladu sa službenim uputama i predlošku završnog rada koji se nalaze ovdje. Prije pisanja završnog rada potrebno je detaljno proučiti sve materijale te se za bilo kakva pitanja javiti mentoru ili komentoru.
Prije početka pisanja završnog rada predlaže se usuglasiti strukturu rada s mentorom ili komentorom. S obzirom na odabran termin predaje završnog rada, cjelovito napisani završni rad potrebno je predati mentoru ili komentoru na čitanje (word i pdf verzije) mailom najmanje 7 dana prije službenog roka za predaju. Završni rad poslan na čitanje mora biti kompletan i pravopisno ispravan (obavezno napraviti provjeru na ispravi.me).
Ukoliko vas zanima neko područje ili tema koja nije predložena slobodno možete predložiti vlastite teme, ideje i projekte nekome od zaposlenika u CRTA-i te potom prijedlog vaše teme možete dogovoriti s potencijalnim mentorom i/ili komentorom i suradnicima na temi. Za bilo kakva druga pitanja slobodno se možete javiti mailom nastavniku zaduženom za pojedinu temu ili doći u vrijeme konzultacija.
Detaljan opis dostupnih tema
Prepoznavanje govora i razumijevanja prirodnog jezika za manipulaciju robotskom rukom
Cilj rada je razviti sučelje kojim se robotska ruka Universal Robots UR5 može upravljati glasom, namijenjeno korisnicima bez programerskog iskustva. Rad integrira Prepoznavanje Govora (Speech-to-Text), Razumijevanje Prirodnog Jezika (Natural Language Understanding – NLU) i Prijevod Naredbi u Izvršenje za manipulaciju robotom putem verbalnih naredbi.
Sustav prima glasovne naredbe i pretvara ih u tekst (Speech-to-Text), zatim NLU modul tumači naredbe i prevodi ih u kontrole za UR5, omogućujući pokrete kao što su bočno, vertikalno kretanje i rotacije, te rotacije zglobova. Evaluacija pokazuje da glasovne naredbe omogućuju jednostavno upravljanje robotskom rukom, ističući potencijal za poboljšanje interakcije čovjek-robot.
Ključne riječi: Prepoznavanje Govora, Razumijevanje Prirodnog Jezika, Kontrola Robotske Ruke, Govor-u-Tekst, Prijevod Naredbi.
Detekcija i klasifikacija objekata na temelju mase pomoću polja vaga
Zadatak je integrirati kompletno rješenje:
- Proučiti literaturu vezanu za detekciju i klasifikaciju objekata, mjerenje mase, i tehnologiju polja vaga
- Razviti metodologiju za detekciju i klasifikaciju objekata na temelju mase
- Implementirati sustav koji koristi polje vaga za klasifikaciju objekata – postavljanje operativnog sustava i izrada programskog okruženja
- Testirati i evaluirati sustav na skupu objekata različite mase

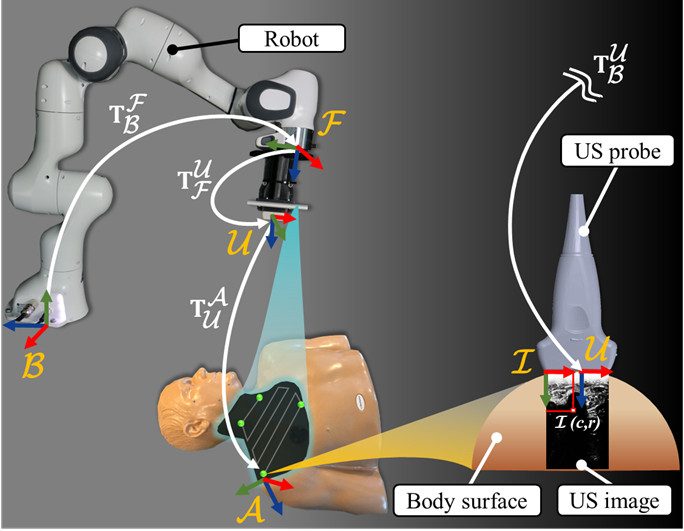
Kalibracija ultrazvučnih sondi s robotskom rukom u medicinskim primjenama
Cilj ovog završnog rada je razviti i implementirati metode kalibracije koje omogućuju preciznu integraciju ultrazvučnih sondi s robotskom rukom, koristeći se 2D slikama dobivenima ultrazvukom. Rad se fokusira na dvije vrste ultrazvučnih sondi: biplanarnu i linearnu, s ciljem određivanja i izračunavanja transformacije između koordinatnog sustava prirubnice robota i koordinatnog sustava ultrazvučne sonde. Za potrebe ovog rada koristi se medicinski ultrazvuk, industrijska robotska ruka i računalo za obradu podataka.
Razvoj i evaluacija PI, PD i PID kontrolera za upravljanje redundantnom robotskom rukom
U okviru ovog rada potrebno je detaljno proučiti mogućnosti i performanse Franka Control Interface-a (FCI), sučelja koje omogućuje brzu i izravnu dvosmjernu komunikaciju niske razine s robotskom rukom i šakom. FCI pruža mogućnost kontrole u stvarnom vremenu s frekvencijom od 1 kHz, što ga čini idealnim za istraživanje i implementaciju novih shema planiranja i upravljanja na niskoj razini. Zadatak uključuje programiranje robota u C++ jeziku kako bi se ostvarilo upravljanje kretanjem robotske ruke koristeći različite načine upravljanja (PI, PD, PID) prema zadanom profilu kretnje vrha alata. Specifični ciljevi rada su:
Razviti C++ programe koji implementiraju PI, PD, i PID načine upravljanja za kretanje vrha alata robotske ruke prema zadanom profilu kretnje.
Izvesti eksperimentalne testove kako bi se odzivi sistema dobiveni primjenom različitih načina upravljanja usporedili s teoretski projektiranim odzivima.
Usporediti performanse PI, PD, i PID načina upravljanja u kontekstu preciznosti pratećeg odziva, vremena ustaljenja, i prekoračenja.
Analizirati i diskutirati prednosti i nedostatke svakog pristupa upravljanja u kontekstu specifičnih aplikacija robotskih ruku.
U praktičnom dijelu rada, potrebno je za razvijene aplikacije oblikovati i izraditi sve potrebne robotske alate i druge konstrukcijske elemente koji će se koristiti u eksperimentima. Rad će biti validiran na opremi u CRTA-i, gdje će biti demonstrirano kretanje robotske ruke na osnovu razvijenih programa.

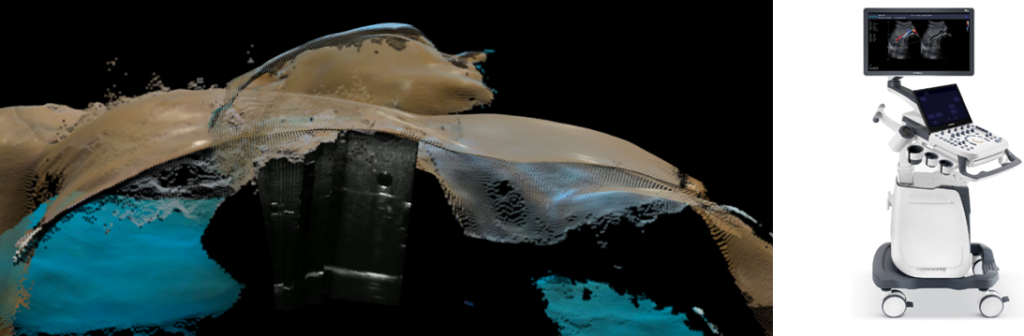
Konverzija i obrada ultrazvučnih slika u medicinskoj robotici
Razviti metodologiju za snimanje slike s ekrana ultrazvučnog uređaja, koristeći odabrane predefinirane postavke. Ovaj proces treba uključivati softverske alate koji mogu efikasno snimiti (detektirati) slike na ekranu i automatski ih pretvoriti u OpenCV Mat format za daljnju obradu i analizu. Konverzija treba osigurati očuvanje kvalitete slike, omogućavajući preciznu vizualizaciju ultrazvučnih podataka. Softverska rješenja trebaju biti optimizirana za brzu obradu, uz minimalan gubitak informacija tijekom konverzije.
Projekt zahtijeva poznavanje C++ programiranja, OpenCV biblioteke, i razumijevanje mehanike robotskih ruku i ultrazvučnih sondi, teži ka integraciji i automatizaciji procesa snimanja za unaprjeđenje medicinskih postupaka.
Robotski sustavi za ispitivanje cjevovoda
Prehrambena, procesna te mnoge druge grane industrije koriste različite vrste cjevovoda za transport bezobličnih tvari kao što su plinovi, tekućine, praškovi i sl. S obzirom na tip sirovine koja se transportira cjevovodima dolazi do kontaminacije unutrašnje stijenke cjevovoda te je cjevovode potrebno čistiti prema definiranom planu čišćenja i održavanja. Proces čišćenja može biti ručni, mehanizirani ili automatizirani/robotizirani. Proces čišćenja je dugotrajan i skup te u pravilu zahtjeva angažman ljudi. Iz tog razloga aktivno se razvijaju robotski sustavi koji imaju mogućnost kretanja kroz teško dostupne cjevovode i izvršavanja korisnih zadataka.
U sklopu ovog rada potrebno je proučiti dostupnu znanstvenu i stručnu literaturu pretraživanjem baza kao što su Scopus, IEEE, Google Scholar i dostupnih patentnih baza. Potrebno je napraviti analizu postojećih robotskih rješenja za kretanje kroz cjevovode unutarnjeg promjera u rasponu od 70 do 150 mm. Za zadanu imitaciju cjevovoda duljine 40m te unutarnjeg promjera 90 mm potrebno je predložiti konceptualno rješenje mobilnog robota koristeći postojeća i/ili vlastita tehnička rješenja.
Prilikom konceptualne razrade robota potrebno je koristiti čim više standardnih mehaničkih, elektromehaničkih, pogonskih, energetskih, senzorskih i upravljačkih komponenata.
Sve dovoljno detaljirane komponente koncepta mobilnog robota moguće je izraditi tehnologijom 3D printa u CRTA-i.
Za više detalja o ovoj temi javiti se doc. dr. sc. Marku Švaci.
Matematičko modeliranje, identifikacija parametara i upravljanje mobilnim robotom s diferencijalnim pogonom
Kod većine mobilnih robota diferencijalne strukture zakoni upravljanja uglavnom su temeljeni samo na kinematičkom modelu robota. Međutim, kod gibanja velikim brzinama i prijenosa teškog tereta bitno je u obzir uzeti dinamiku robota i pogonskih motora. Zbog toga je u takvim slučajevima važno izvesti potpuni matematički model i provesti identifikaciju parametara kao nužnom preduvjetu za sintezu i praktičnu implementaciju upravljačkih zakona ove klase sustava.
U radu je potrebno:
- Izvesti potpuni matematički model mobilnog robota diferencijalne strukture s uključenom dinamikom i kinematikom robota te dinamikom aktuatora.
- Prethodno izvedeni matematički model napisati u obliku linearnog regresijskog modela s obzirom na parametre mobilnog robota. Zatim na mobilnom robotu diferencijalne kinematike u Laboratoriju za autonomne sustave (CRTA) provesti eksperimentalna mjerenja primjenom vanjskog mjernog sustava OptiTrack u svrhu identifikacije parametara robota.
- Načiniti simulacijske modele u odgovarajućem matematičkom programskom alatu u kojima će se direktno numerički rješavati diferencijalne jednadžbe primjenom ugrađenih funkcija.
- Na temelju simulacija provesti sintezu PID regulatora kojim će se osigurati željena brzina kotača robota. Provesti simulacije za različite ulazne/referentne brzine te komentirati odzive.
- Razmotriti mogućnosti implementacije prethodno dizajniranog PID regulatora na mobilnom robotu diferencijalne kinematike u Laboratoriju za autonomne sustave (CRTA).
Za više detalja o ovoj temi javiti se izv. prof. Vladimiru Miliću i asistentu Branimiru Ćaranu.
Primjena RFID-a na transportnom sustavu
Nosači predmeta na transportnim sustavima koriste se u mnogim različitim proizvodnim procesima. Nosači drže predmeta u položaju tijekom transporta, proizvodnje i pregleda. Obično se dodjeljuju određenim predmeta. Stoga je moguće koristiti nosače za njihovu identifikaciju i praćenje koraka procesa. Radne komade potrebno je identificirati automatski i bez grešaka pomoću nosača. Ova identifikacija mora biti moguća na različitim točkama u postrojenju za decentraliziranu kontrolu slijeda procesa. Pojedinačni koraci proizvodnje moraju biti međusobno usklađeni. Istodobno, cilj je stvoriti uvjete za potpunu sljedivost pojedinih koraka. Rješenje je primjena RFID oznaku na prikladnom mjestu, na primjer, na donjoj strani nosača. RFID glave za čitanje/pisanje montirane su na relevantnim procesnim stanicama. RFID sustav osigurava sigurnu identifikaciju nosača. Budući da se RFID oznaka može napisati, njen skup podataka može se na svakoj postaji dopuniti informacijama o izvedenim koracima procesa. Te se informacije mogu koristiti za upravljanje skretnicama ili za pokretanje specifičnih proizvodnih procesa. Oznake također mogu pohraniti podatke o kvaliteti. U sklopu rada potrebno je primjeniti SIMATIC RF300 RFID system PROFINET na transportnom sustavu u laboratoriju.
Za više detalja o ovoj temi javiti se dr. sc. Bojanu Šekoranji.
Primjena mekanih hvataljki za manipulaciju predmetima
Mekane hvataljke (eng. soft grippers) svoju primjenu u robotici pronalaze prilikom rukovanja osjetljivih predmeta. Prednost mekanih hvataljki je u tome što se svojim oblikom ili drugim značajkama mogu prilagoditi različitim predmetima. S ciljem ispitivanja mogućnosti različitih mekanih hvataljki u ovom radu potrebno je napraviti:
- detaljan pregled i analizu mekanih hvataljki koje se koriste u industriji,
- na postojećem robotu u laboratoriju za autonomne sustave potrebno je validirati rad najmanje tri dostupne mekane hvataljke (mGripTM , piSOFTGRIP® i FlexShapeGripper),
- predložiti, oblikovati i izraditi eksperimentalan postav i scenarij rukovanja najmanje pet raznovrsnih predmeta pomoću odabranog robota koristeći tri različite mekane hvataljke,
- kodirati robotske alate i omogućiti automatsku izmjenu mekanih hvataljki koristeći standardni izmjenjivač alata dostupan u laboratoriju.
Za razvijenu primjenu robota potrebno je oblikovati i izraditi (3D print, modularni aluminijski profili i sl.) sve potrebne robotske alate, prirubnice, nosače i druge konstrukcijske elemente. Rad je potrebno validirati na opremi u Laboratoriju za autonomne sustave.
Za više detalja o ovoj temi javiti se doc. dr. sc. Marku Švaci.
Primjena robotskog operativnog sustava (ROS2) na mobilnom robotu u Gazebo virtualnom okruženju
Robotski operativni sustav (ROS) je okruženje koje je iznimno zastupljeno u akademskoj zajednici robotičara. U posljednjih nekoliko godina sve je veća prisutnost ROS okruženja i u industrije te se stoga javila potreba za unapređenjem istog. Kako je ROS razvijen kao okruženje za znanstvenike i stoga nije dovoljno robustan, zajednica je počela razvijati ROS2. ROS2 je druga inačica ROS-a koja je razvijana s ciljem bolje i robusnije implementacije u industriji mobilnih i industrijskih robota. Glavni naglasak u ROS2 okruženju je izvedba u realnom vremenu, robusnost i sigurnost sustava.
U sklopu ovog rada potrebno je:
- detaljno istražiti ROS2, njegove mogućnosti i primjenu te ga usporediti s ROS-om,
- istražiti i implementirati algoritme razvijene za ROS u ROS2 okruženju,
- u Gazebo simulatoru izgraditi što detaljnije virtualno okruženje Laboratorija za računalnu ,inteligenciju u CRTA-i,
- primjenom ROS2 okruženja dodati mobilnog robota u Gazebo simulator i osposobiti mogućnost upravljanja istim,
- implementirati postojeće algoritme za mapiranje i lokalizaciju mobilnog robota.
Za više detalja o ovoj temi javiti se doc. dr. sc. Marku Švaci i doktorandu Branimiru Ćaranu.
Integracija robotskog operativnog sustava (ROS) na mobilnom robotu Waypoint Robotics VECTOR
Waypoint Robotics VECTOR je mobilni robot s četiri švedska kotača pod 45 stupnjeva (mecanum). Upravljanje robotom se odvija preko web servisa gdje se spaja na IP adresu robota te mu se zadaju zadaci poput mapiranja, lokalizacije, navigacije te rješavanja misija. Zbog nepraktičnosti takve primjene i želje da se u skoroj budućnosti napravi integracija robotske ruke na robota zadatak ovog završnog rada je:
- ostvaraiti komunikaciju s robotom primjenom rosbridge čvora u ROS-u,
- omogućiti slanje naredbi za brzine i čitanje stanja senzora u ROS-u,
- implementirati algoritme za mapiranje i lokalizaciju,
- implementirati algoritam za navigiranje robota u mapiranom prostoru,
- pripremiti sustav za integraciju robotske ruke.
Za više detalja o ovoj temi javiti se doc. dr. sc. Marku Švaci i doktorandu Branimiru Ćaranu.
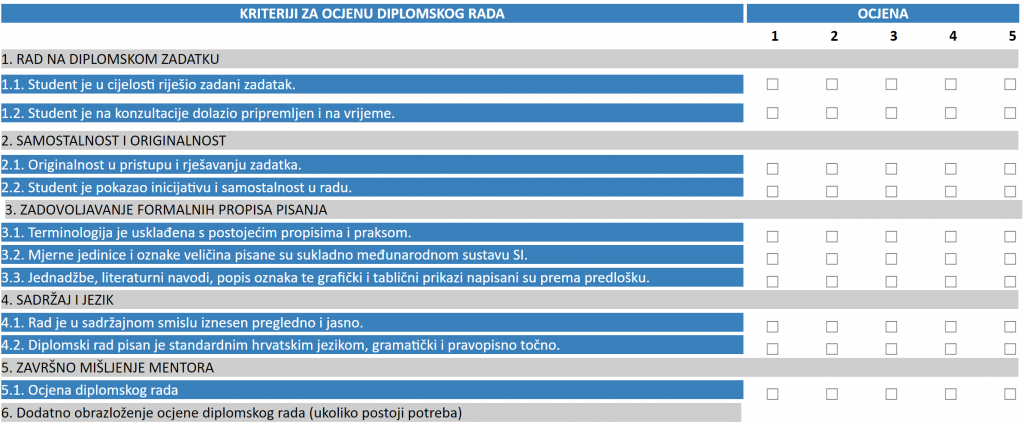
Završne radove potrebno je pisati prema službenim uputama FSB-a. Sukladno pridržavanju formalnih pravila i naputaka, a ponajviše rada na završnom radu, samostalnosti i originalnosti formira se ocjena mentora i komentora. Uz pojedinačnu ocjenu završnog rada, prilikom prezentacije pred povjerenstvom dodjeljuje se ocjena iz prezentacije završnog rada.
Pozivamo sve studentice i studente da obavezno pročitaju sva pravila i naputke vezane uz izradu završnih radova. Za upute za izradu prezentacije završnog rada obratite se izravno vašem mentoru.
Izradu internetske stranice je sufinancirala Europska unija iz Europskog fonda za regionalni razvoj.
Sadržaj internetske stranice isključiva je odgovornost Fakulteta strojarstva i brodogradnje.