Available BSc topics
List of available topics Undergraduate theses
- Speech recognition and natural language understanding for robotic arm manipulation (reserved)
- Detection and classification of objects based on mass using field scales
- Calibration of ultrasound probes with a robotic arm in medical applications
- Development and evaluation of PI, PD and PID controllers for controlling a redundant robotic arm (reserved)
- Conversion and processing of ultrasound images in medical robotics (reserved)
- Implementation of the algorithm for the analysis of the substrate structure using a depth camera in mobile robotics
- Mathematical modeling, identification of parameters and control of a mobile robot with a differential drive (mentor associate professor Vladimir Milić)
- Application of RFID in Transportation Systems
- Application of Soft Grippers for Object Manipulation
- Integration of the Robot Operating System (ROS) on the Waypoint Robotics VECTOR Mobile Robot
- Application of RFID in the transport system
- Robotic systems for testing pipelines (completed, possible continuation)
Must read: brief instructions and rules
For all students interested in the BSc theses done so far in CRTA, you can view the theses here. All BSc theses done within the old laboratory were defended before 2021. All theses from 2021 and 2022 were created and implemented within CRTA. Students who choose a thesis topic expect active engagement and responsible work on the assigned topic. All students who choose a thesis in one of the provided topics will be equipped with all necessary equipment, workstations, and (shared) computers in the laboratory and/or practicums. If the thesis involves an experimental part, students will be enabled to access to the appropriate laboratory where the experiments will be carried out: Laboratory for Autonomous Systems, Laboratory for Medical Robotics, or Laboratory for Artificial Intelligence. In addition to working in laboratories, students also have access to two practicums whose occupation schedules can be seen here. While working in the laboratories and practicums, students must adhere to all rules of behavior as well as rules for the use of the computer, laboratory, and other equipment. After work, it is necessary to leave the workstations in CRTA clean and tidy.
In addition to laboratories and laboratory equipment, in the student section of CRTA, students have their 3D printers, various student tools, and equipment that are necessary for a large number of topics that include practical experimental work.
Researcher Luka Rabuzin is responsible for working with students and other tools, and he will provide you with all the necessary guidelines when you start working on your topic.
For any general questions and experiences, you can always reach out to our current students, graduates, or demonstrators.
Writing and submission of the BSc thesis
The undergraduate thesis should be written in accordance with the official guidelines and template for the undegraduate thesis, which can be found here. Before writing the thesis, it is necessary to thoroughly study all the materials and contact mentor or comentor for any questions.
Before starting to write the thesis, it is suggested to discuss the structure of the thesis with the mentor or comentor. Considering the chosen submission deadline for the undergraduate thesis, the complete written thesis should be submitted to the mentor or comentor for review (Word and PDF formats) via email at least 7 days before the official submission deadline. The thesis sent for review must be complete free of spelling or grammar errors (make sure to perform a spell check using correct me).
If you are interested in an area or topic that is not suggested, feel free to suggest your own topics, ideas and projects to one of the CRTA employees, and then you can discuss your topic proposal with a potential mentor and/or comentor and collaborators on the topic. For any other questions, feel free to email the teacher responsible for a specific topic or visit them during consultation hours.
Detailed description of available topics
Speech recognition and natural language understanding for robotic arm manipulation
The goal of the work is to develop an interface with which the Universal Robots UR5 robotic arm can be controlled by voice, intended for users without programming experience. The work integrates Speech-to-Text, Natural Language Understanding (NLU) and Command Translation into Execution for robot manipulation through verbal commands.
The system receives voice commands and converts them to text (Speech-to-Text), then the NLU module interprets the commands and translates them into controls for the UR5, enabling movements such as lateral, vertical movement and rotations, and joint rotations. The evaluation shows that voice commands enable easy control of the robotic arm, highlighting the potential for improving human-robot interaction.
Keywords: Speech Recognition, Natural Language Understanding, Robotic Hand Control, Speech-to-Text, Command Translation.

Detection and classification of objects based on mass using field scales
The task is to integrate the complete solution:
- Study literature related to object detection and classification, mass measurement, and field scale technology
- Develop a methodology for object detection and classification based on mass
- Implement a system that uses the field of scales for the classification of objects - setting up the operating system and creating the programming environment
- Test and evaluate the system on a set of objects of different mass

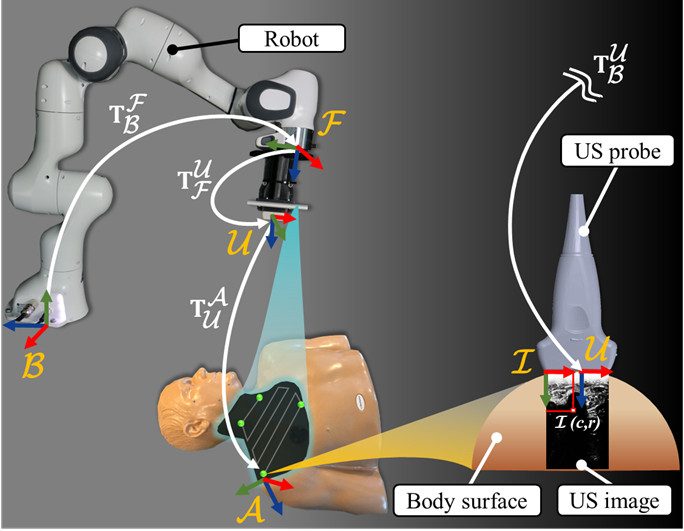
Calibration of ultrasound probes with a robotic arm in medical applications
The goal of this final work is to develop and implement calibration methods that enable precise integration of ultrasound probes with a robotic arm, using 2D images obtained by ultrasound. The paper focuses on two types of ultrasonic probes: biplanar and linear, with the aim of determining and calculating the transformation between the coordinate system of the robot flange and the coordinate system of the ultrasonic probe. For the purposes of this work, medical ultrasound, an industrial robotic arm and a computer for data processing are used.
Development and evaluation of PI, PD and PID controllers for controlling a redundant robotic arm
In the framework of this work, it is necessary to study in detail the possibilities and performance of Frank Control Interface (FCI), an interface that enables fast and direct low-level two-way communication with a robotic arm and hand. FCI provides real-time control with a frequency of 1 kHz, making it ideal for exploring and implementing new low-level planning and management schemes. The task involves programming the robot in C++ language in order to control the motion of the robot arm using different control modes (PI, PD, PID) according to the given tool tip motion profile. The specific goals of the work are:
Develop C++ programs that implement PI, PD, and PID control modes to move the tool tip of a robotic arm according to a given motion profile.
Perform experimental tests to compare system responses obtained using different control modes with theoretically designed responses.
To compare the performance of PI, PD, and PID control modes in the context of tracking response precision, settling time, and overshoot.
Analyze and discuss the advantages and disadvantages of each control approach in the context of specific robotic arm applications.
In the practical part of the work, it is necessary to design and manufacture all the necessary robotic tools and other structural elements that will be used in the experiments for the developed applications. The work will be validated on the equipment at CRTA, where the movement of the robotic arm will be demonstrated based on the developed programs.

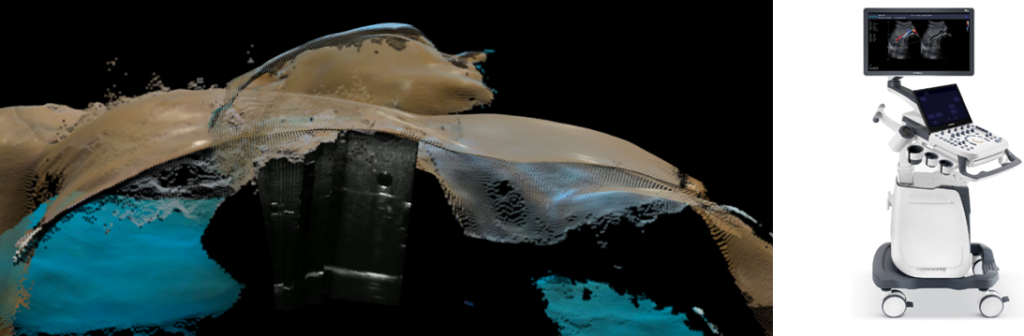
Conversion and processing of ultrasound images in medical robotics
Develop a methodology for capturing an image from the screen of an ultrasound device, using selected predefined settings. This process should include software tools that can efficiently capture (detect) images on the screen and automatically convert them into OpenCV Mat format for further processing and analysis. The conversion should ensure preservation of image quality, enabling precise visualization of ultrasound data. Software solutions should be optimized for fast processing, with minimal loss of information during conversion.
The project requires knowledge of C++ programming, the OpenCV library, and an understanding of the mechanics of robotic arms and ultrasound probes, and aims to integrate and automate imaging processes to improve medical procedures.
Robotic Systems for Pipeline Inspection
The food, process, and many other industries utilize various types of pipelines for the transportation of formless substances such as gases, liquids, powders, and more. Due to the nature of the transported materials, the inner walls of these pipelines can become contaminated, necessitating a defined cleaning and maintenance plan. The cleaning process can be manual, mechanized, or automated/robotized. Cleaning pipelines is a time-consuming and costly task that typically requires human involvement. For this reason, robotic systems are actively being developed to navigate through challenging pipelines and perform useful tasks.
In this thesis, it is necessary to conduct a thorough review of available scientific and technical literature by searching databases such as Scopus, IEEE, Google Scholar, and patent databases. The analysis should focus on existing robotic solutions for navigating through pipelines with internal diameters ranging from 70 to 150 mm. For a given imitation of a 40m long pipeline with an internal diameter of 90 mm, it is required to propose a conceptual solution for a mobile robot utilizing existing and/or novel technical approaches.
During the conceptual development of the robot, it is necessary to utilize as many standard mechanical, electromechanical, propulsion, power, sensor, and control components as possible.
All sufficiently detailed components of the mobile robot concept can be manufactured using 3D printing technology available at CRTA.
For more details on this topic, please contact doc. dr. sc. Marko Švaco.
Mathematical modeling, parameter identification and control of a mobile robot with differential drive
In most mobile robots with a differential structure, the control laws are mainly based only on the kinematic model of the robot. However, when moving at high speeds and transporting heavy loads, it is important to take into account the dynamics of the robot and drive motors. Therefore, in such cases, it is important to perform a complete mathematical model and perform parameter identification as a necessary prerequisite for the synthesis and practical implementation of control laws of this class of system.
The work requires:
- Derive a complete mathematical model of a mobile robot with a differential structure, including the dynamics and kinematics of the robot and the dynamics of the actuator.
- Write the previously derived mathematical model in the form of a linear regression model with regard to the parameters of the mobile robot. Then, on the mobile differential kinematics robot in the Laboratory for Autonomous Systems (CRTA), conduct experimental measurements using the external measurement system OptiTrack for the purpose of identifying the robot's parameters.
- Create simulation models in an appropriate mathematical software tool in which differential equations will be solved directly numerically using built-in functions.
- On the basis of simulations, carry out the synthesis of a PID controller that will ensure the desired speed of the robot wheel. Carry out simulations for different input/reference speeds and comment on the responses.
- Consider the possibilities of implementing a previously designed PID controller on a differential kinematics mobile robot in the Autonomous Systems Laboratory (CRTA).
For more details on this topic, contact associate professor. Vladimir Milić and assistant Branimir Ćaran.
Application of RFID in Transportation Systems
Workpiece carriers on transport systems are used in many different manufacturing processes. The carriers hold items in position during transport, production and inspection. They are usually assigned to specific objects. Therefore, it is possible to use carriers for their identification and tracking of process steps. The workpieces must be identified automatically and without errors using the carrier. This identification must be possible at different points in the plant for decentralized control of the process sequence. The individual production steps must be coordinated with each other. At the same time, the goal is to create conditions for complete traceability of individual steps. The solution is to apply the RFID tag in a suitable place, for example, on the underside of the carrier. RFID read/write heads are mounted on the relevant processing stations. The RFID system ensures secure identification of the carrier. Since the RFID tag can be written, its dataset can be supplemented at each station with information about the steps in the process performed. This information can be used to manage switches or to initiate specific production processes. Tags can also store quality data.Workpiece carriers on transport systems are used in many different manufacturing processes. The carriers hold items in position during transport, production and inspection. They are usually assigned to specific objects. Therefore, it is possible to use carriers for their identification and tracking of process steps. The workpieces must be identified automatically and without errors using the carrier. This identification must be possible at different points in the plant for decentralized control of the process sequence. The individual production steps must be coordinated with each other. At the same time, the goal is to create conditions for complete traceability of individual steps. The solution is to apply the RFID tag in a suitable place, for example, on the underside of the carrier. RFID read/write heads are mounted on the relevant processing stations. The RFID system ensures secure identification of the carrier. Since the RFID tag can be written, its dataset can be supplemented at each station with information about the steps in the process performed. This information can be used to manage switches or to initiate specific production processes. Tags can also store quality data. The RFID system ensures secure identification of the carrier. Since the RFID tag can be written, its data set can be supplemented at each station with information about the performed process steps. This information can be used to manage switches or to initiate specific production processes. Tags can also store quality data. As part of this thesis, it is necessary to apply the SIMATIC RF300 RFID PROFINET system on the laboratory transport system.
For more details on this topic, please contact dr.sc. Bojan Šekoranja.
Application of Soft Grippers for Object Manipulation
Soft grippers find their application in robotics when handling delicate objects. The advantage of soft grippers is that they can adapt to different objects through their shape or other features. To explore the capabilities of different soft grippers in this thesis, it is necessary to do:
- detailed review and analysis of soft grippers used in industry,
- on the existing robot in the Laboratory for Autonomous Systems, it is necessary to validate the operation of at least three available soft grippers (mGripTM , piSOFTGRIP® and FlexShapeGripper),
- propose, design and create an experimental set-up and scenario for handling at least five different objects by the selected robot using three different soft grippers,
- code robotic tools and enable automatic change of soft grippers using a standard tool changer available in the laboratory.
For the developed application of the robot, it is necessary to design and manufacture (3D print, modular aluminum profiles, etc.) all necessary robot tools, flanges, supports and other structural elements. The thesis must be validated on the equipment in the Autonomous Systems Laboratory.
For more details on this topic, please contact doc. dr. sc. Marko Švaco.
Application of Robot Operating System (ROS2) on a Mobile Robot in the Gazebo Virtual Environment
The Robot Operating System (ROS) is a hugely popular environment within the academic robotics community. In recent years, there has been an increasing presence of ROS in the industry, leading to a need for its improvement. As ROS was initially developed as an environment for researchers, and therefore, it may not be sufficiently robust for industrial applications, the community started developing ROS2. ROS2 is the second version of ROS that was developed with the aim of better and more robust implementation in the mobile and industrial robot industry. The main emphasis on the ROS2 environment is real-time performance, robustness and system security.
In this thesis, it is necessary:
- to examine in detail ROS2, its possibilities and its application and to compare with ROS,
- to research and implement algorithms developed for ROS in the ROS2 environment,
- in the Gazebo simulator, build as detailed as possible the virtual environment of the Laboratory for Artificial Intelligence in CRTA,
- using the ROS2 environment, add a mobile robot to the Gazebo simulator and form the ability to handle it,
- to implement existing algorithms for mapping and localization of a mobile robot.
For more details on this topic, please contact doc. dr. sc. Marko Švaco and Ph.D Branimir Ćaran.
Integration of the Robot Operating System (ROS) on the Waypoint Robotics VECTOR Mobile Robot
The Waypoint Robotics VECTOR is a mobile robot with four Swedish wheels set at 45 degrees (mecanum wheels). The robot is controlled through a web service by connecting to the robot's IP address and assigning tasks such as mapping, localization, navigation, and mission solving. Due to the impracticality of such an implementation and the desire to integrate a robotic arm onto the robot in the near future, the task of this undergraduate thesis is to:
- establish communication with the robot using rosbridge node in ROS
- enable sending speed commands and reading sensor status in ROS,
- implement algorithms for mapping and localization,
- to implement a robot navigation algorithm in mapped space,
- prepare the system for the integration of the robotic arm.
For more details on this topic, please contact doc. dr. sc. Marko Švaco and Ph.D Branimir Ćaran.
The undergraduate theses must be written according to the official guidelines of the FMENA. The grade of the mentor and comentor is formed by adherence to formal regulations and directions, but more importantly by work on the undergraduate thesis, independence, and originality. In addition to the individual grade of the undergraduate thesis, a grade is also awarded during the presentation in front of the committee.
We invite all students to read them all rules and instructions related to the creation of final works. For instructions on creating a presentation of the final thesis, contact your mentor directly.
The website was co-financed by the European Union from the European Regional Development Fund.
The content of the website is the sole responsibility of the Faculty of Mechanical Engineering and Naval Architecture.